Driving ramps, Query position and activity, Query velocity and activity – RMS Technologies 4-AXIS CONTROLLER/DRIVER User Manual
Page 25: Additional inputs / outputs
S I X P A C K / Q U A D P A C K
25
8.4 Driving
Ramps
⇒
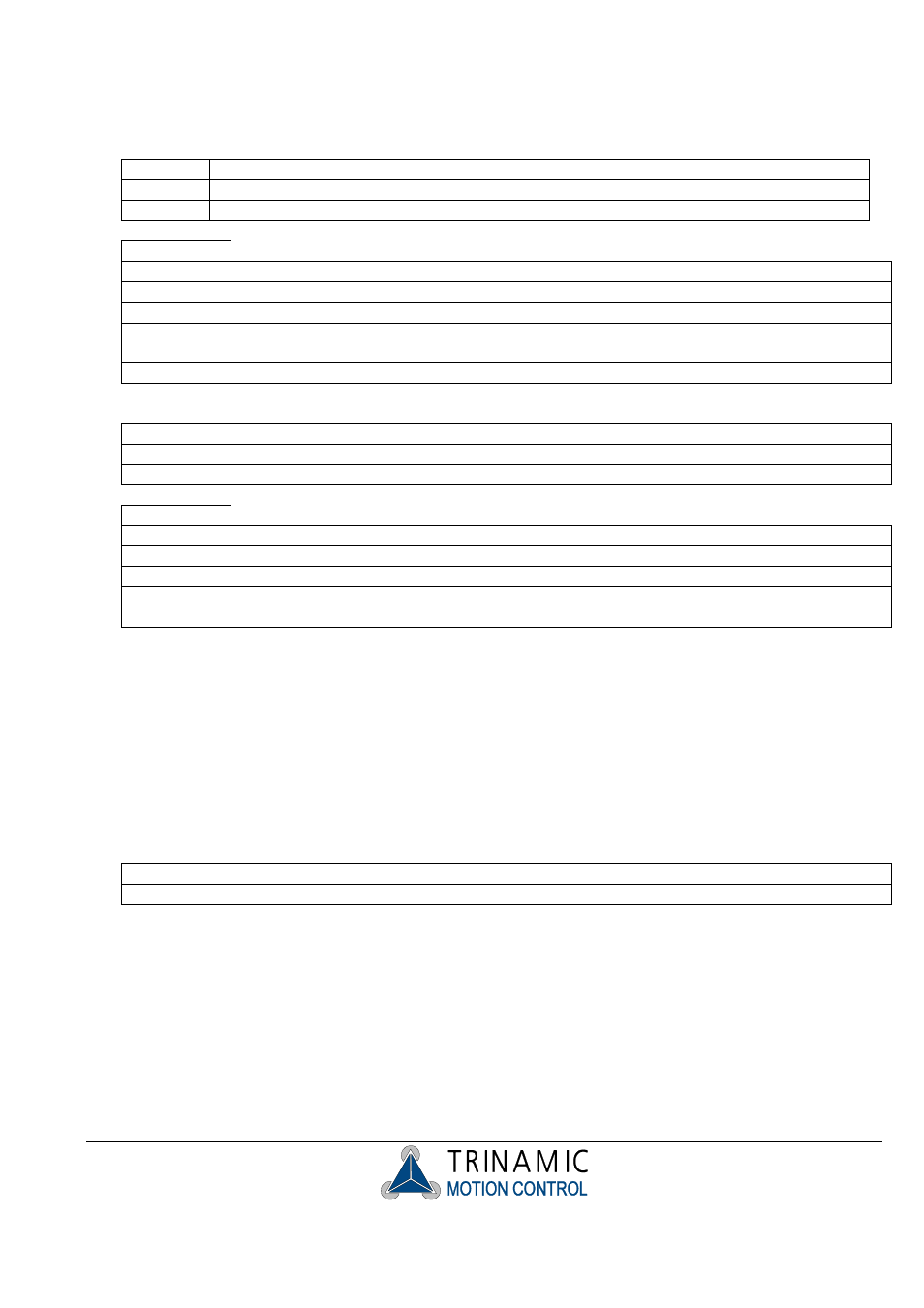
Query Position and Activity
CMD
$20
P0
motnr (0...5)
P1 response
address
response
CMD $20
P0
motnr (0...5)
P1,2,3,4 #
posact (signed long): current position
P5
Current action (0: inactive, 5: ramp, 10: PI-controller, 15: rotation, 20 – 29: reference
switch search, 30: mechanical reference)
P6 bit
0:
stop-status. 1=Stop-condition has occurred. Flag is cleared after read.
⇒
Query Velocity and Activity
CMD
$21
P0 motnr
(0...5)
P1
Response address
Response
CMD
$21
P0 motnr
(0...5)
P1,2 # Vact
(integer): actual velocity
P3
Current action(0: inactive, 5: ramp, 10: PI-controller, 15: rotation,
20 – 29: reference switch search, 30: mechanical reference)
⇒
Start search of Reference
First the motor is stopped. The motor optionally drives fast (vrefmax), searching for the position of the
switch. When the switch is found, the motor is driven back to the point, where the switch becomes
inactive. Then it is slowly driven with vmin towards the switch to find the exact position. If the switch
cannot be found again at slow speed where it had been found before, or if no switch is seen during
125% of the drive limit-range, the whole procedure repeats by first stopping again, which may give
another chance to hold grip for an axis out of control. After the reference point has been identified via
the reference point switch the position is set to null respectively to null-offset and the motor resumes
its previous operation e.g. by driving a to the actual position posact, where the reference search
started, if CMD $16 P5, Bit0=0 (s. CMD $16).
($22 and CMD $15, P5, Bit2 start the same action!)
CMD
$22
P0
motnr (0...5)