P r o g r a m m i n g, Hints for programming, Strategy for parameter setting – RMS Technologies 4-AXIS CONTROLLER/DRIVER User Manual
Page 15: Setting of motor current, Velocity configuration (global), 1 hints for programming, 511 and small values div
S I X P A C K / Q U A D P A C K
15
7 P R O G R A M M I N G
7.1 Hints for Programming
⇒
Strategy for Parameter Setting
The Pack can be parameterized for standard applications with a few commands since it is pre-set with
default values. However these default values should not substitute a thorough configuration of all
parameters in a given application. Normally the following parameters should be configured for your
application:
⇒
Setting of Motor Current
Configure maximum current (s. CMD $10) and current control (s. CMD $11) as needed. The minimum
current (which provides proper microstepping) selected by current control is 19% (Index 6) for every
parameter.
⇒
Velocity Configuration (global)
Calculate clkdiv (s. CMD $12) with the step frequency formula (s. begin of chapter Instruction Set) so
that the required maximum step velocity is achieved with v
i
= 511 and small values div
i
= 0 or 1.
⇒
Setting of starting Velocity, max. Velocity and max. Acceleration
These values (s. CMD $13 and $14) should be adapted to the motor type, mechanical load, and so on.
As a reference value div
i
should be set so, that the maximum velocity vmax could be set between 256
and 511. This way maximum resolution is obtainable. Then the acceleration amax can be configured.
The velocity vstart should not be set too low.
⇒
Setting of Motor Parameters and Reference Search Parameters
These settings describe the axis type, the reference search, and so on. For time saving purposes both,
fast reference search FastRef (s. CMD $15 P6, Bit1) should be activated and the maximum velocity for
this reference search should be set. To avoid errors caused by vibrations of the motor during fast
reference search, de-bouncing of the reference switch FilterSwitch (s. CMD $15 P5, Bit7) should be
activated, too, and the mask for reference point de-bouncing (s. CMD $16) should be programmed with
an applicable value. vmin (always used with predivider div
i
set to 3) will be used while exactly locating
the reference switch. The fastest possible vmin will be choosen automatically when its value is set to 0.
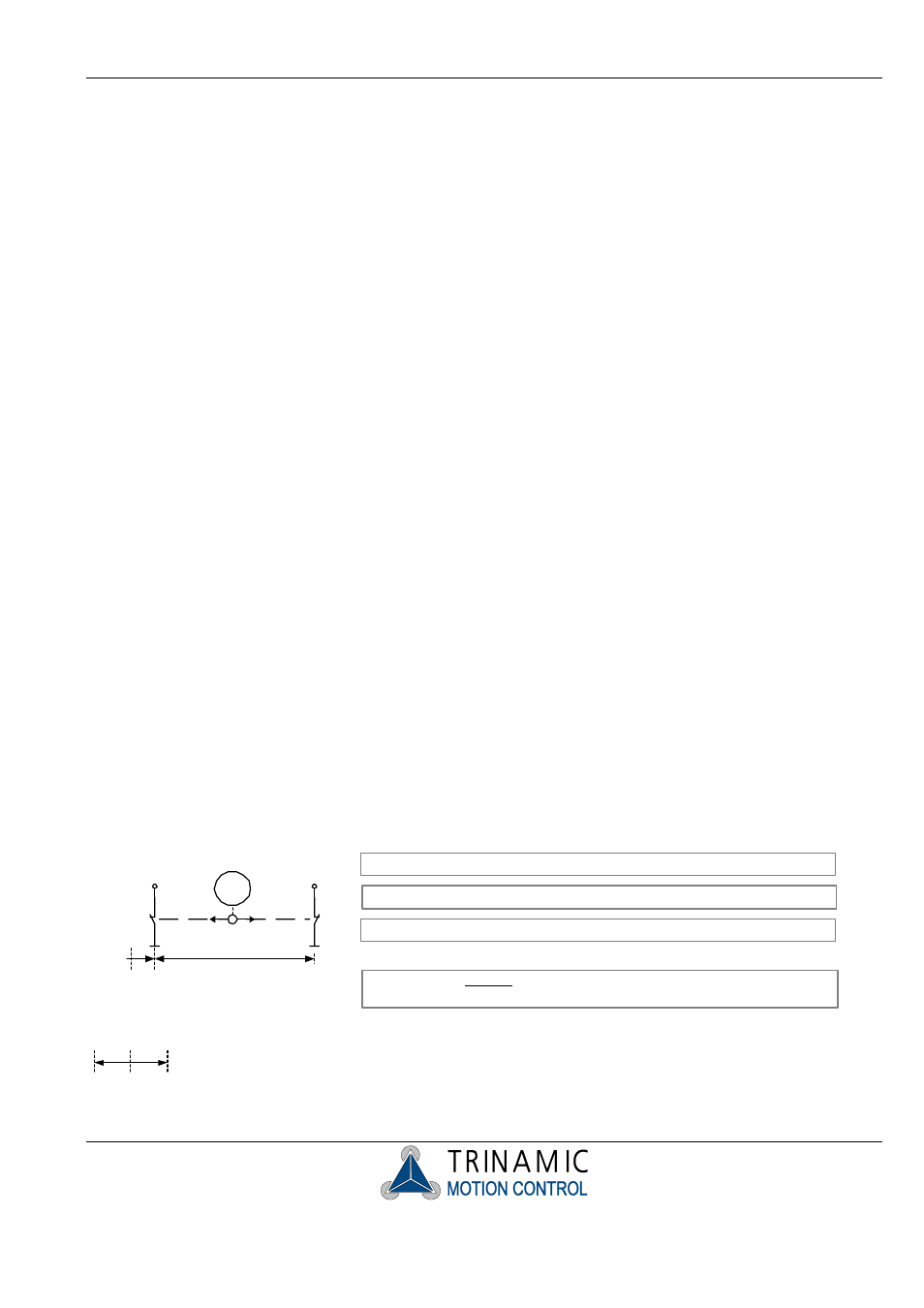
Stop
Left
Stop
Right
R
ef
er
enc
e
S
topR
poslimit
positive
direction
motor
re
fe
renc
e poi
nt
nul
l pos
iti
on
nul
l poi
nt
-o
ffs
et
traveller
te
st
nul
lr
ange
Graphic assumes null-left Flag is set and null point offset is positive(s. CM D $15).
In this configuration the reference sw itch is reliably closed at position null.
Note: testnullrange >= w idth of reference sw itch!
settings: null point-offset, poslimit -> CMD $15
testnullrange -> CMD $18