Examples, Setting motor parameters – RMS Technologies 4-AXIS CONTROLLER/DRIVER User Manual
Page 17
S I X P A C K / Q U A D P A C K
17
7.2 Examples
Attention: All 9 Bytes must be sent to the interface, otherwise the PACK does not recognize the
command and waits for the missing bytes.
$ indicates that the value is in hexadecimal notation!
⇒
Setting motor parameters
CMD $15 contains information about the motor and settings for the reference drive.
For more details see Hints for Programming and CMD $15 in the Instruction set!
Pseudocode:
SendToPack(address);
// Address of the Pack(Six- or Quadpack)
SendToPack($15);
// Command in hexadecimal notation
SendToPack(P0);
//
Motor
number
(0...5)
SendToPack(P1);
//
poslimit LSB
SendToPack(P2);
SendToPack(P3);
SendToPack(P4);
//
poslimit MSB
SendToPack(P5);
// further settings, for more information read the instruction set
SendToPack(P6);
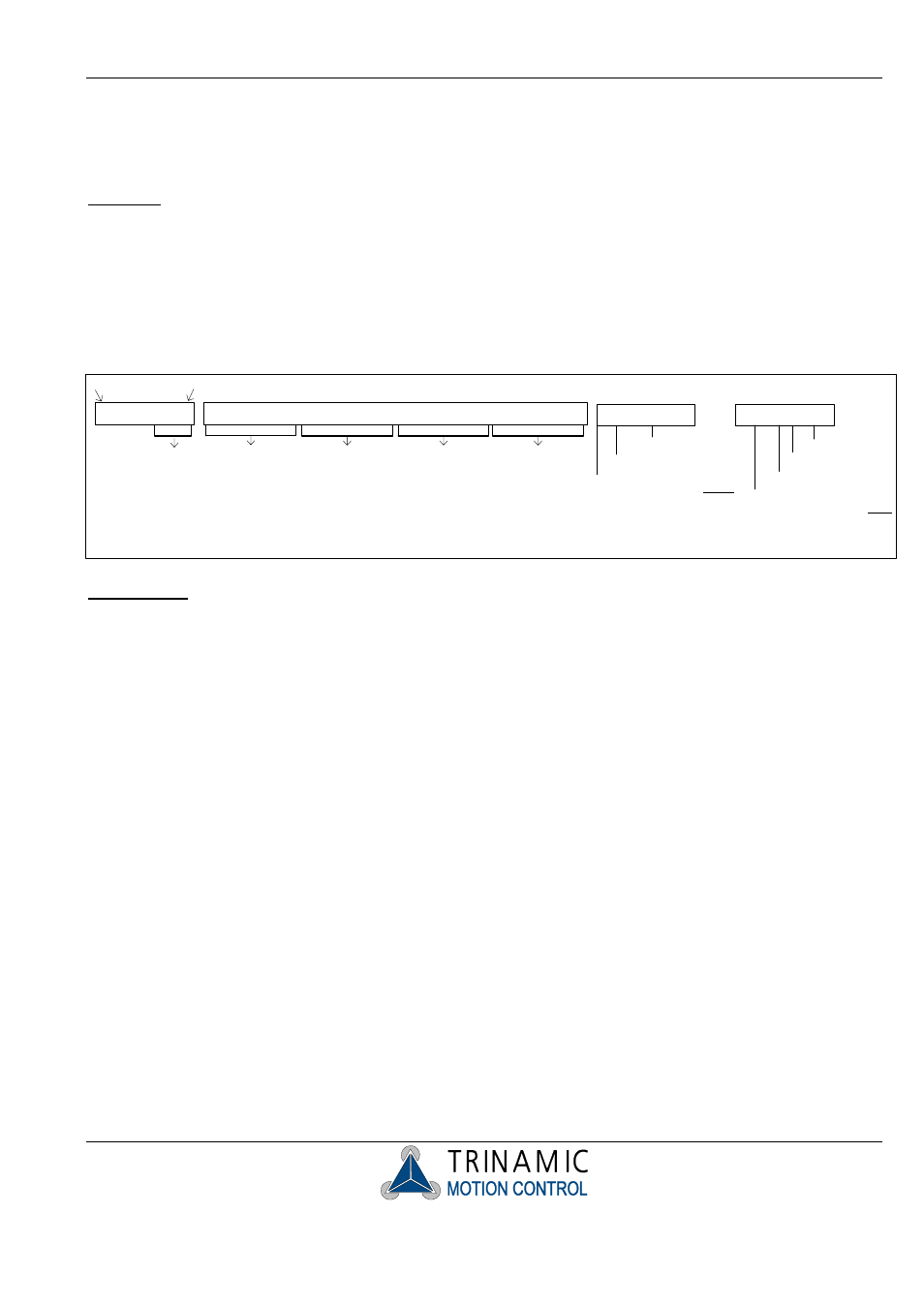
P5 = 200
1 1 0 0 1 0 0 0
8
+ 64
+128
200
TestNull
StopNull
FilterSwitch
P6 = 90
0 1 0 1 1 0 1 0
NullPositive
2
+ 8
+16
+64
90
FastRef
DelayTestNull
StopSoft
P0 = 0
0 0 0 0 0 0 0 0
MotorNr.1
(0...5)
P1, P2, P3, P4 = 400
(LSB first!)
1 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
LSB
MSB
-> poslimit = 00000190 hex ( = 400 decimal)
NOTE: P5, Bit1=0 -> linear motor -> poslimit=whole intended driving range
Bit 0
Bit 7
( = C8 hex )
( = 5A hex )
3rdSB
2rdSB
( = 1 hex
= 1 dez )
( = 90 hex
= 144 dez)