Link of programs, Event alarm, Determination of pid parameters – NOVUS Controller N1200 User Manual
Page 10
Controller N1200
NOVUS AUTOMATION
10 / 13
The program tolerance defines the maximum deviation between PV
and SP for the execution of the profile. If this deviation is exceeded,
the program will be halted until the deviation falls to within the
tolerance band.
Programming 0 (zero) in the “Ptol” parameter disables the program
tolerance and the profile execution will continue regardless of the PV
value (time priority as opposed to SP priority).
LINK OF PROGRAMS
It is possible to create a more complex program, with up to 180
segments, joining the 20 programs. This way, at the end of a program
execution the controller immediately starts to run the next one, as
indicated in the “LP".
To force the controller to run a given program or many programs
continuously, it is only necessary to link a program to itself or the last
program to the first.
SV
Time
T1
T2
T3
T4
T5
T1
T2
T3
T4
SP0
SP1
SP2
SP3
SP4
SP5 / SP0
SP1 SP2
SP3
SP4
Program 1
Program 2
Figure 10 - Example of interlinked programs
EVENT ALARM
The Event Alarm function associates the alarms to specific segments
of a program. The information of which alarms are to be activated or
deactivated is given in parameters “ PE1“ to “ PE9. Press the
and
keys until the desired alarm numbers are displayed.
The Event Alarm requires that the Alarm function be configured as
“rS “.
Notes:
1. If PtoL is different than zero, the controller will wait for the PV to
reach the first program set point SP0 in order to start the
program execution. Otherwise, it will start promptly.
2. Should any power failure occur, the controller resumes the
program execution at the beginning of the segment that was
interrupted.
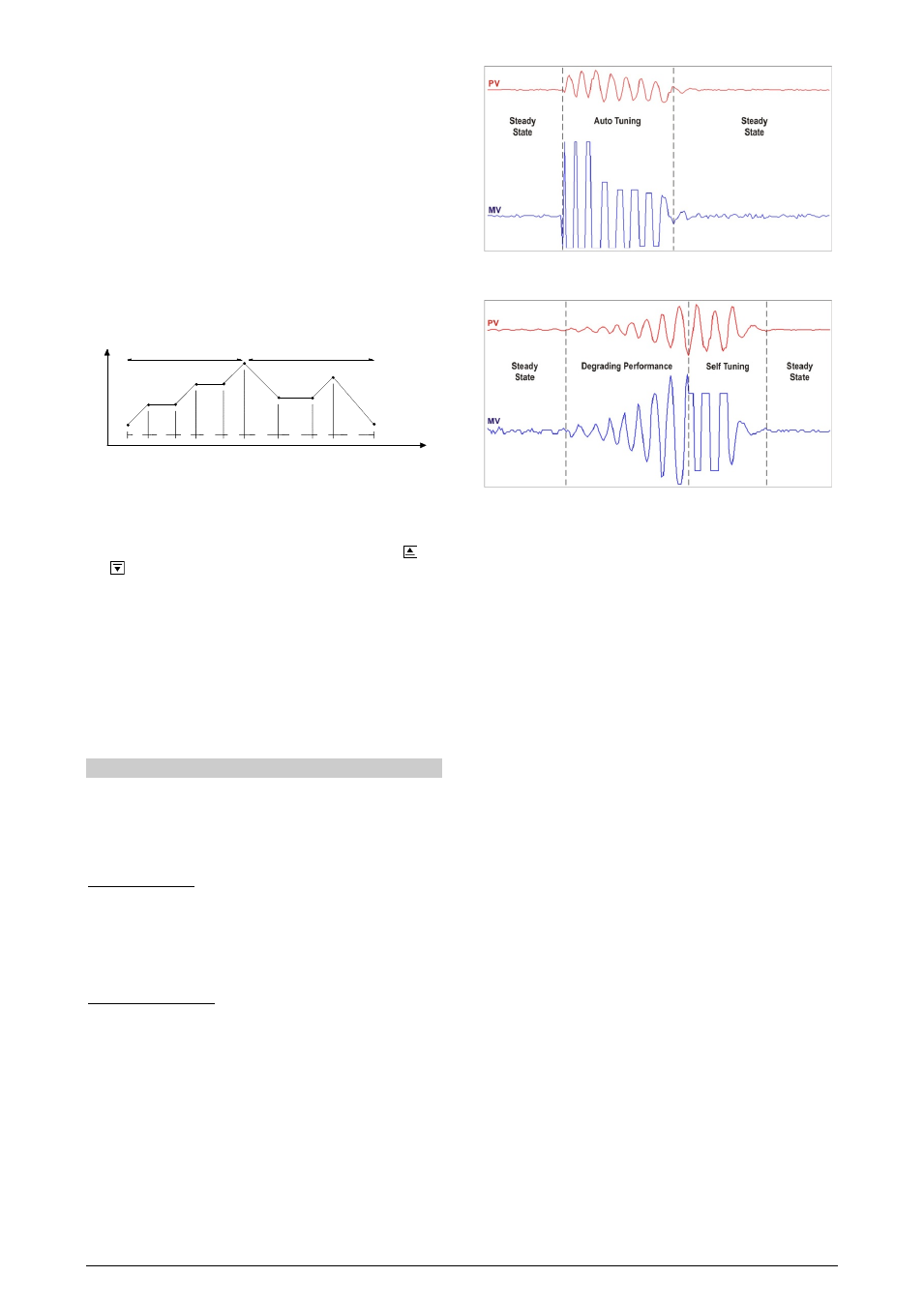
DETERMINATION OF PID PARAMETERS
The determination (or tuning) of the PID control parameters in the
controller can be carried out in an automatic way and auto-adaptative
mode. The automatic tuning is always initiated under request of the
operator, while the auto-adaptive tuning is initiated by the controller
itself whenever the control performance becomes poor.
Automatic tuning: In the beginning of the automatic tuning the
controller has the same behavior of an ON/OFF controller, applying
minimum and maximum performance to the process. Along the
tuning process the controller's performance is refined until its
conclusion, already under optimized PID control. It begins
immediately after the selection of the options FAST, FULL, RSLF or
TGHT, defined by the operator in the parameter ATUN.
Auto-adaptive tuning: Is initiated by the controller whenever the
control performance is worse than the one found after the previous
tuning. In order to activate the performance supervision and auto-
adaptative tuning, the parameter ATUN must be adjusted for SELF,
RSLF or TGHT. The controller's behavior during the auto-adaptative
tuning will depend on the worsening of the present performance. If
the maladjustment is small, the tuning is practically imperceptible for
the user. If the maladjustment is big, the auto-adaptive tuning is
similar to the method of automatic tuning, applying minimum and
maximum performance to the process in ON/OFF control.
Figure 11 – Example of auto tuning
Figure 12 - Example of auto-adaptative tuning
The operator may select, through the ATUN parameter, the desired
tuning type among the following options:
• OFF: The controller does not carry through automatic tuning or
auto-adaptative tuning. The PID parameters will not be
automatically determined nor optimized by the controller.
• FAST: The controller will accomplish the process of automatic
tuning one single time, returning to the OFF mode after
finishing. The tuning in this mode is completed in less time, but
not as precise as in the FULL mode.
• FULL: The same as the FAST mode, but the tuning is more
precise and slower, resulting in better performance of the P.I.D.
control.
• SELF: The performance of the process is monitored and the
auto-adaptative tuning is automatically initiated by the
controller whenever the performance becomes poorer.
After a tuning cycle, the controller starts collecting data from the
process for determining the performance benchmark that will
allow evaluate the need for future tunings. This phase is
proportional to the process response time and is signaled by the
flashing TUNE indication on the display. It is recommended not
to turn the controller off neither change the SP during this
learning period.
• rSLF: Accomplishes the automatic tuning and returns into the
SELF mode. Typically used to force an immediate automatic
tuning of a controller that was operating in the SELF mode,
returning to this mode at the end.
• TGHT: Similar to the SELF mode, but in addition to the auto-
adaptative tuning it also executes the automatic tuning
whenever the controller is set in RUN=YES or when the
controller is turned on.
Whenever the parameter ATUN is altered by the operator into a
value different from OFF, an automatic tuning is immediately initiated
by the controller (if the controller is not in RUN=YES, the tuning will
begin when it passes into this condition). The accomplishment of this
automatic tuning is essential for the correct operation of the auto-
adaptative tuning.