Videotec DTRX3 User Manual
Page 48
Page
18
MNVCDTRX301_0850
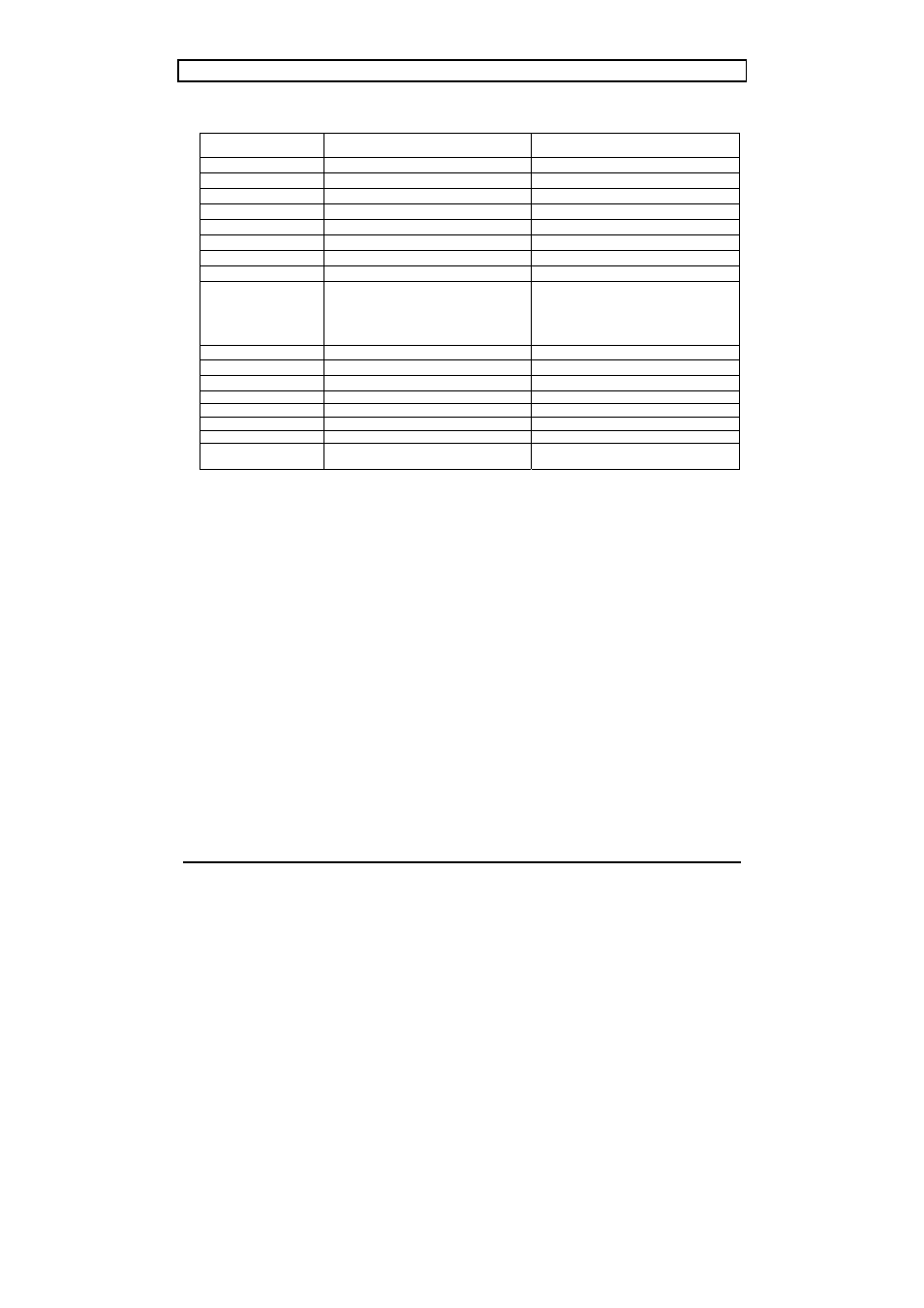
11 Pelco D controls recognised by the DTRX3 receiver
As well as recognising standard Pelco D controls relating to joystick and lens movements, the DTRX3 receiver
is able to recognise and execute the following extended Pelco D controls:
Pelco D Control
Recognised control by DTRX3
Particular notes
Set Auxiliary
Aux ON
Accepted values between 1 and 4
Clear Auxiliary
Aux OFF
Accepted values between 1 and 4
Set Pattern Start
Autopan Toggle
--
Run Pattern
Patrol Toggle
--
Remote Reset
Reset of receiver
--
Go To Preset “1
÷40”
Scan
Accepted values between 1 and 40
Set Preset “1
÷40”
Preset position
Accepted values between 1 and 40
Clear Preset “1
÷40”
Reset of Preset single position
Accepted values between 1 and 40
Set Preset “41”
Patrol parameters acknowledgement
starting (see example***)
--
Set Preset “…”
Patrol “Position From”
Accepted values between 1 and 40
Set Preset “…”
Patrol “Position To”
Accepted values between 1 and 40
Set Preset “…”
Patrol “Pause”
Accepted values between 1 and 99
Set Preset “42”
Patrol Start
--
Set Preset “43”
Patrol Stop
--
Set Preset “44”
Washer-Wiper*
--
Set Preset “45”
Washer Start**
--
Set Preset “46”
Wiper Start**
--
Set Preset “47”
Washer Stop
--
Set Preset “49”
Wiper Stop
--
Set Preset “55”
Set Preset “66”
Reset of all Preset positions
The two commands must be in
sequence
NOTE
*
Timing procedure: in the first the Washer function is enabled and successively the Wiper. The Wiper
remains enabled even after the Washer switching off for a prearranged time pause.
**
Automatic disconnection after 10 seconds
*** Example of Patrol sequence programming
If you want to set up a Patrol sequence that starts from Preset position 19, ends at Preset position 33 and
stops for one minute at every position reached
:
$!
enables parameter insertion
!)
start Patrol at position 19
##
end Patrol at position 33
&*
pause of 60 seconds at every position reached
$"
start of sequence
$#
sequence end