KROHNE BATCHCONTROL 5014 C User Manual
Page 17
Installation and operating instructions
17
BATCHCONTROL
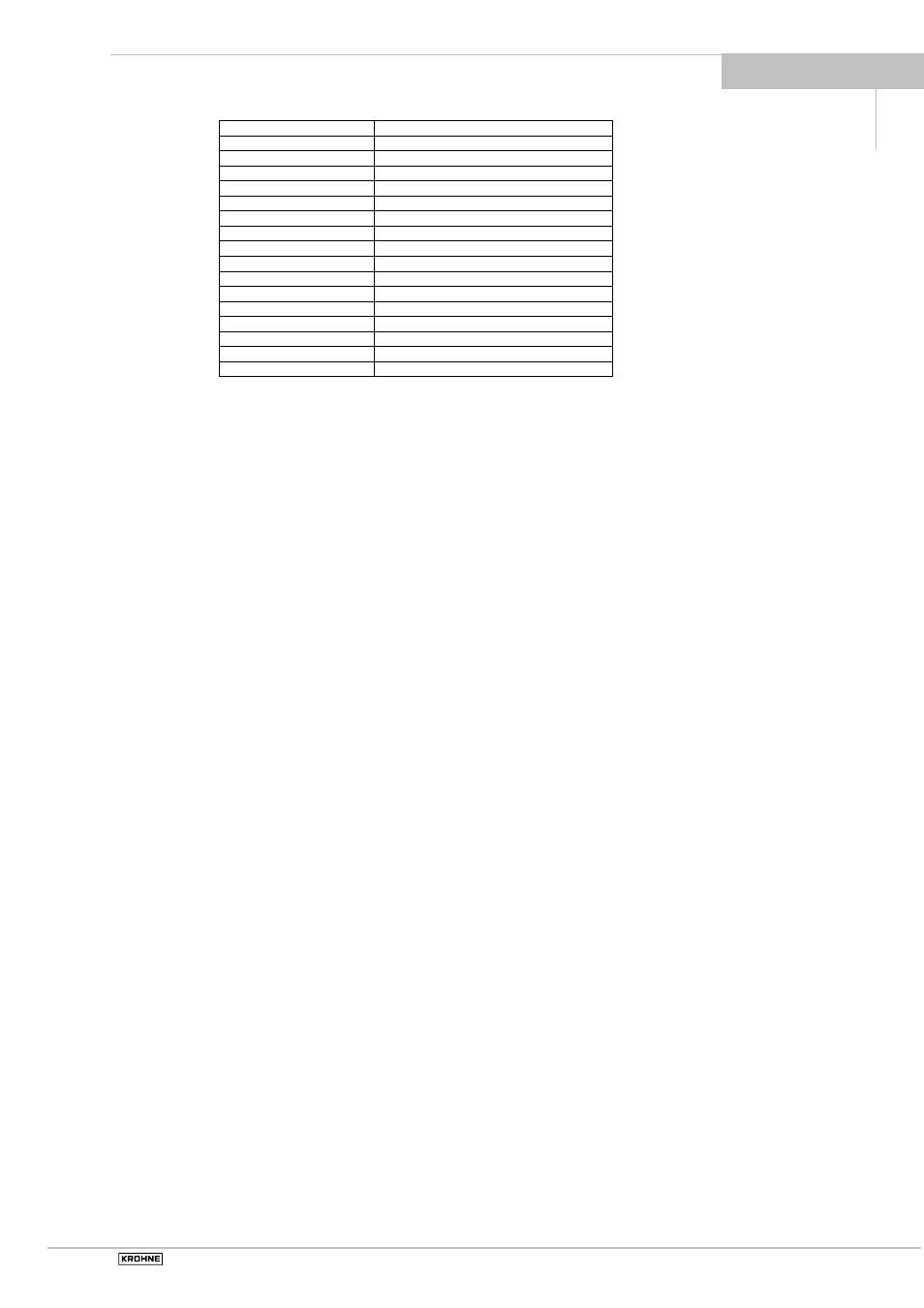
The object dictionary for the parameters is subdivided into the following groups:
Object number range
Description
10xxH
CAN open parameter
300xH
Flow sensor parameter
301xH
Electronic temperature sensor
302xH
Liquid temperature sensor
303xH
Function block 1
304xH
Function block 2
305xH
Function block 3
306xH
Function block 4
307xH
Function block 5
308xH
Function block 6
309xH Batching
30AxH CAN
parameter
32xxH
Customer specific 1 bit memory
33xxH
Customer specific 8 bit memory
34xxH
Customer specific 16 bit memory
35xxH
Customer specific 32 bit memory
The complete list of all parameters can be found at the end of the manual.
To be able to represent the variety of all possible messages on the bus, the CANopen definition
hasn't been used at the definition of the TPDOs and RPDOs. If this function is programmed, then
the device sends at every message in the first data byte a description and in the following bytes
the data. This shall be explained at an example:
The user needs every flow measurement for the analysis of the valve. With the parameter
3002.02 the PDO is defined. After this parameter was stored in the BATCHCONTROL
5014C, it sends the actual volume flow every 20 ms. The Telegramm starts in the first byte
with the descriptor (in this case 01H) followed by the measurement value in float format.
Many parameters can use the same PDO. The distinction of the data is made by the first
byte (called descriptor in the parameter list at the end of the manual).
This function shouldn't be used in CANopen nets.
4.5 Temperature
sensors
Two temperature sensors are installed inside the BATCHCONTROL 5014C. The first one is
mounted on the BATCHCONTROL print board. This one measures the electronic temperature.
The information can be important during the CIP process or in hot filling application. If the
temperature is higher then 70°C the life time of the electronic components are reduced. An upper
and lower setpoint can be programmed. If one of this points are reached, an alarm message is
send via the CAN bus. Alternativly this information can be programmed for an output, which is
used as an alarm output.
The second sensor is mounted on the outside of the ceramic pipe. It has the same functionality as
the electronic temperature sensor. Since the temperature sensor doesn't have direct contact to the
liquid, the temperature measurement is delayed. The delay time depends on the temperature
gradient and the temperature difference between outside housing and liquid. The delay time can
be a few seconds.
Each sensor can be programmed for the following functions:
•
Without use (off)
•
Temperature value for the bus
•
Temparature alarm for the bus
• Customers
specific
programming
4.6 Flow
Sensor
The integrated flow sensor measures precisely the flow velocity. From this signal the device
generates the information for the internal electronic volume counter. Furthermore the flow values
and the counter are actualized every 20ms. It can be programmed for the following functions:
•
Without use (off)
•
Volume flow value for the bus
•
Totalized Volume value for the bus
4.7 An example for a filling process
The function of the device shall be represented at the example of a two-stage filling device. The
following order is used:
Output ‘1’ is for the low speed fluid valve. This valve is opened during the complete filling
time. The target volume is 1000ml.
Output ‘2’ is for the high speed fluid valve. This valve switch off 50ml before the target
4