Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 334
10 Appendix
10.1.2 Parameters
10-4
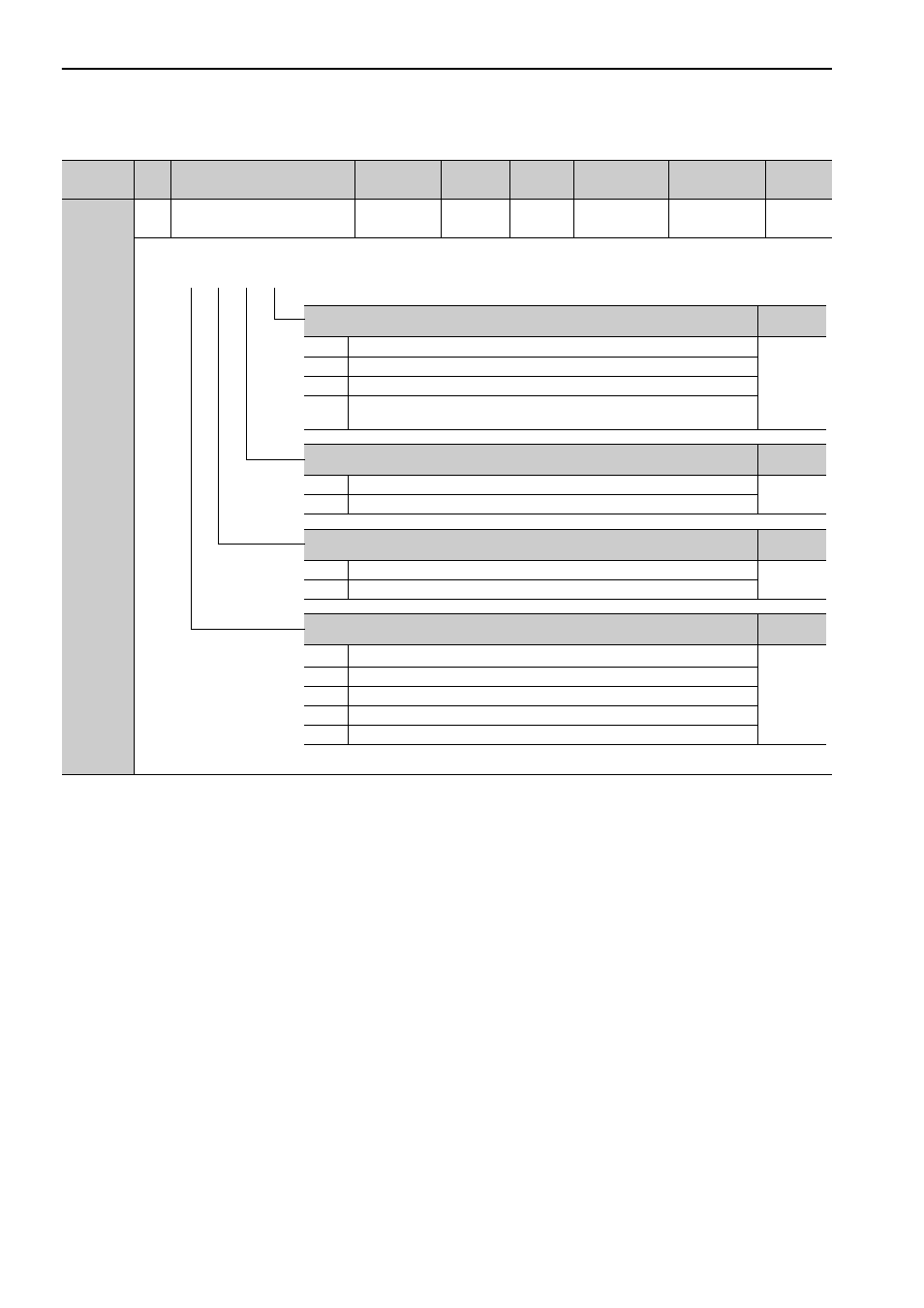
Pn002
2
Application Function Select
Switch 2
0000 to 4113
−
0000
After restart
Setup
−
∗1. For details, refer to
Σ
-V Series User’s Manual MECHATROLINK-II Commands (No.: SIEP S800000 54).
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Reference
Section
∗The mode will be switched to semi-closed position control if Pn002.3 is set to 0.
MECHATROLINK Command Position and Speed Control Option
Reference
Section
0
The set value of P_TLIM, NTLIM, and TFF are ignored.
*1
1
P_TLIM and NTLIM operate as the torque limit values.
2
TFF operates as the torque feed forward.
3
When P-CL and N-CL in the OPTION field are available, P_TLIM and NTLIM oper-
ate as the torque limit value.
Torque Control Option
Reference
Section
0
VLIM is not available.
*1
1
VLIM operates as the speed limit value.
Absolute Encoder Usage
Reference
Section
0
Uses absolute encoder as an absolute encoder.
4.7
1
Uses absolute encoder as an incremental encoder.
External Encoder Usage
Reference
Section
0
Do not use external encoder.
*
8.3.1
1
Uses external encoder in forward rotation direction.
2
Reserved (Do not change.)
3
Uses external encoder in reversed rotation direction.
4
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.