Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 319
9 Troubleshooting
9.1.2 Troubleshooting of Alarms
9-22
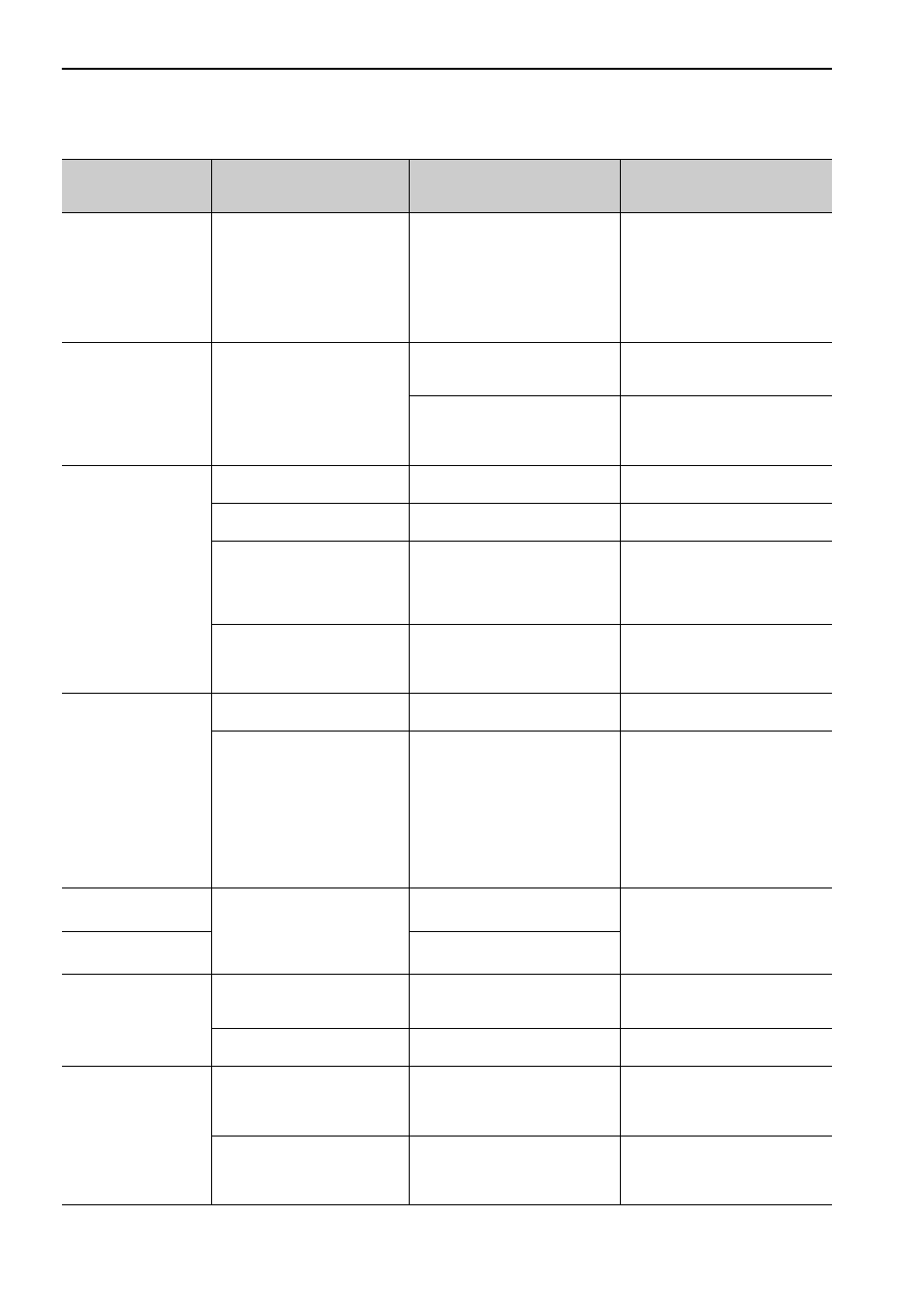
A.Eb1:
Safety Function Signal
Input Timing Error
The lag between activations of
the input signals /HWBB1 and
/HWBB2 for the HWBB function
is ten second or more.
Measure the time lag between the /
HWBB1 and
/HWBB2 signals.
The output signal circuits or devices
for /HWBB1 and
/HWBB2 or the SERVOPACK
input signal circuits may be faulty.
Alternatively, the input signal
cables may be disconnected. Check
if any of these items are faulty or
have been disconnected.
A.Ed1:
Command Execution
Timeout
A timeout error occurred when
using an MECHATROLINK
command.
Check the motor status when the
command is executed.
Execute the SV_ON or SENS_ON
command only when the motor is
not running.
For fully-closed loop control, check
the status of the external encoder
after an output is made to execute
the command.
Execute the SENS_ON command
only when an external encoder is
connected.
A.F10:
Main Circuit Cable
Open Phase
(With the main power
supply ON, voltage was
low for more than 1 sec-
ond in an R, S, or T
phase.)
(Detected when the main
power supply was turned
ON.)
The three-phase power supply
wiring is incorrect.
Check the power supply wiring.
Confirm that the power supply is
correctly wired.
The three-phase power supply is
unbalanced.
Measure the voltage at each phase
of the three-phase power supply.
Balance the power supply by chang-
ing phases.
A single-phase power is input
without setting Pn00B.2 (power
supply method for three-phase
SERVOPACK) to 1 (single-phase
power supply).
Check the power supply and the
parameter setting.
Match the parameter setting to the
power supply.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.F50:
Servomotor Main
Circuit Cable
Disconnection
(The servomotor did not
operate or power was not
supplied to the servomo-
tor even though the
SV_ON (Servo ON)
command was input
when the servomotor
was ready to receive it.)
A SERVOPACK fault occurred.
−
The SERVOPACK may be faulty.
Replace the SERVOPACK.
The wiring is not correct or there
is a faulty contact in the motor
wiring.
Check the wiring.
Make sure that the servomotor is
correctly wired.
FL-1
*2
:
System Alarm
SERVOPACK failure
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
FL-2
*2
:
System Alarm
−
CPF00:
Digital Operator
Transmission Error 1
The contact between the digital
operator and the SERVOPACK is
faulty.
Check the connector contact.
Insert securely the connector or
replace the cable.
Malfunction caused by noise
interference.
−
Keep the digital operator or the
cable away from noise sources.
CPF01:
Digital Operator
Transmission Error 2
A digital operator fault occurred.
−
Disconnect the digital operator and
then re-connect it. If the alarm still
occurs, the digital operator may be
faulty. Replace the digital operator.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
∗2. These alarms are not stored in the alarm history and are displayed only in the panel display.
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions