Motion control, 4 new multi-function digital output settings, 5 new multi-function analog input settings – Yaskawa G5 Motion Control User Manual
Page 8: 6 using a absolute encoder as position feedback
Motion Control
Date: 08/18/04, Rev: 04-08
Page 8 of 22
TM.G5SW.020
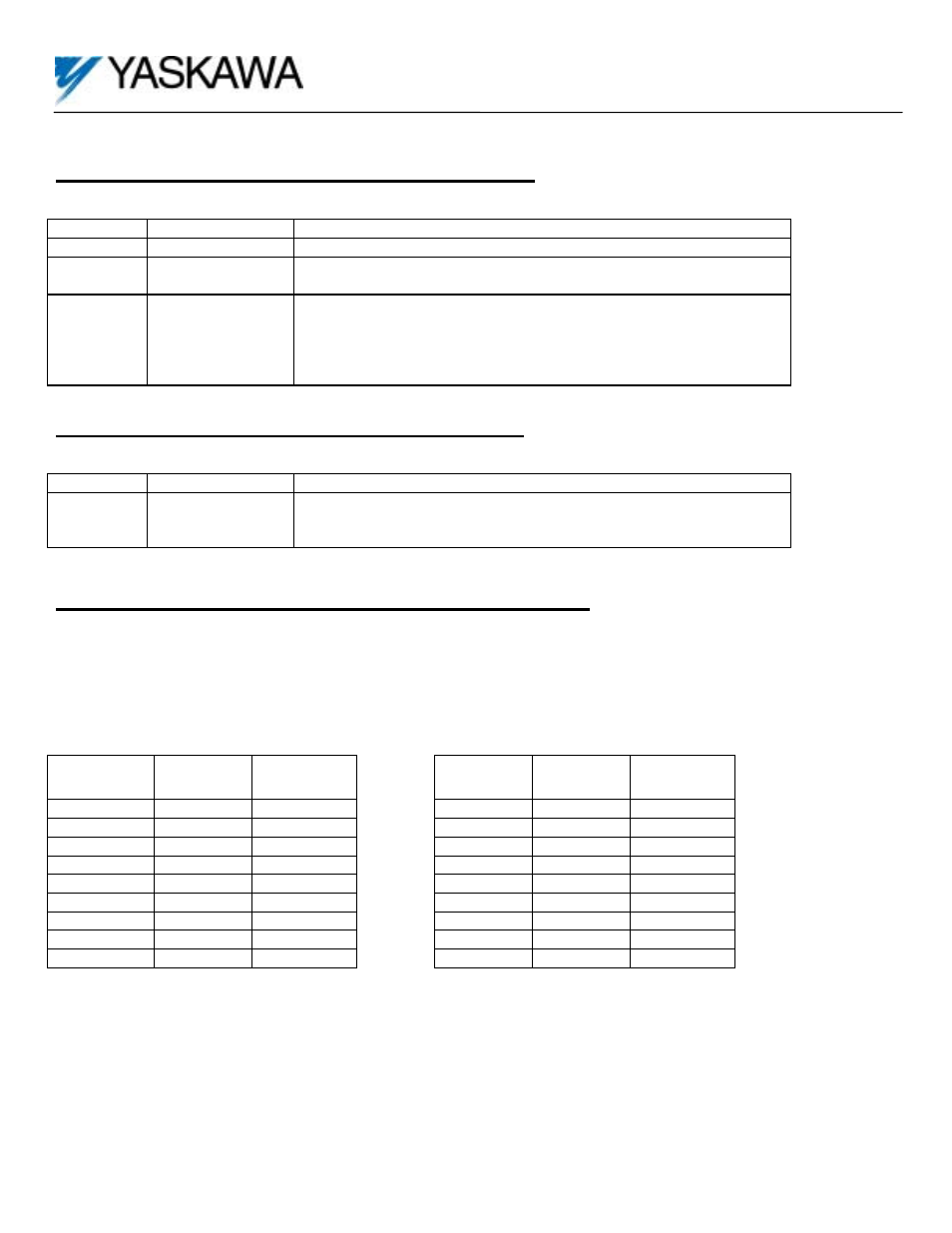
3.4 New Multi-Function Digital Output Settings
For constants F5-01 & 02 and H2-01 through H2-03:
Setting Display
Description
40
Move in Progress
Closed: Drive is completing the specified move profile.
41 Move
Complete
Closed: Move routine has been completed and is within the specified
stop motion window (P1-05).
42 Home
Status
With P2-07 =0 (Homing complete) Closed = Drive has successfully
completed the homing routine and knows its position relative to the
home switch.
With P2-07 =1 (Homing needed) Closed = Drive has not successfully
completed the homing routine .
3.5 New Multi-Function Analog Input Settings
For constants H3-05 and H3-09:
Setting Display
Description
21 Motion
Dist
Sets the length of move for the selected move profile. When P1-01 is
set for an analog length of move, this input will control the destination
of the move. See parameter P1-06.
3.6 Using a Absolute encoder as Position Feedback
For Applications that must retain the position data during a power loss, the use of an absolute encoder is required.
The drive uses a DI-16H2 option card to acquire position date from an absolute encoder. The DI-16H2 card has the
capability of decoding 18 Bits of GRAY code information giving the system a resolution of 1 part in 262144. If an encoder
with more than 18 bits is used, select the group of 18 bits that is appropriate for the application.
Terminal
Strip
Terminal
Number
Encoder
GRAY Bit
Terminal
Strip
Terminal
Number
Encoder
GRAY Bit
TC1
1
Bit 0 Gray
TC1
10
Bit 9 Gray
TC1
2
Bit 1 Gray
TC2
1
Bit 10 Gray
TC1
3
Bit 2 Gray
TC2
2
Bit 11 Gray
TC1
4
Bit 3 Gray
TC2
3
Bit 12 Gray
TC1
5
Bit 4 Gray
TC2
4
Bit 13 Gray
TC1
6
Bit 5 Gray
TC2
5
Bit 14 Gray
TC1
7
Bit 6 Gray
TC2
6
Bit 15 Gray
TC1
8
Bit 7 Gray
TC2
7
Bit 16 Gray
TC1
9
Bit 8 Gray
TC2
8
Bit 17 Gray