Motion control, 6 typical control wiring diagram, Speed (+) time typical homing profile – Yaskawa G5 Motion Control User Manual
Page 5
Motion Control
Date: 08/18/04, Rev: 04-08
Page 5 of 22
TM.G5SW.020
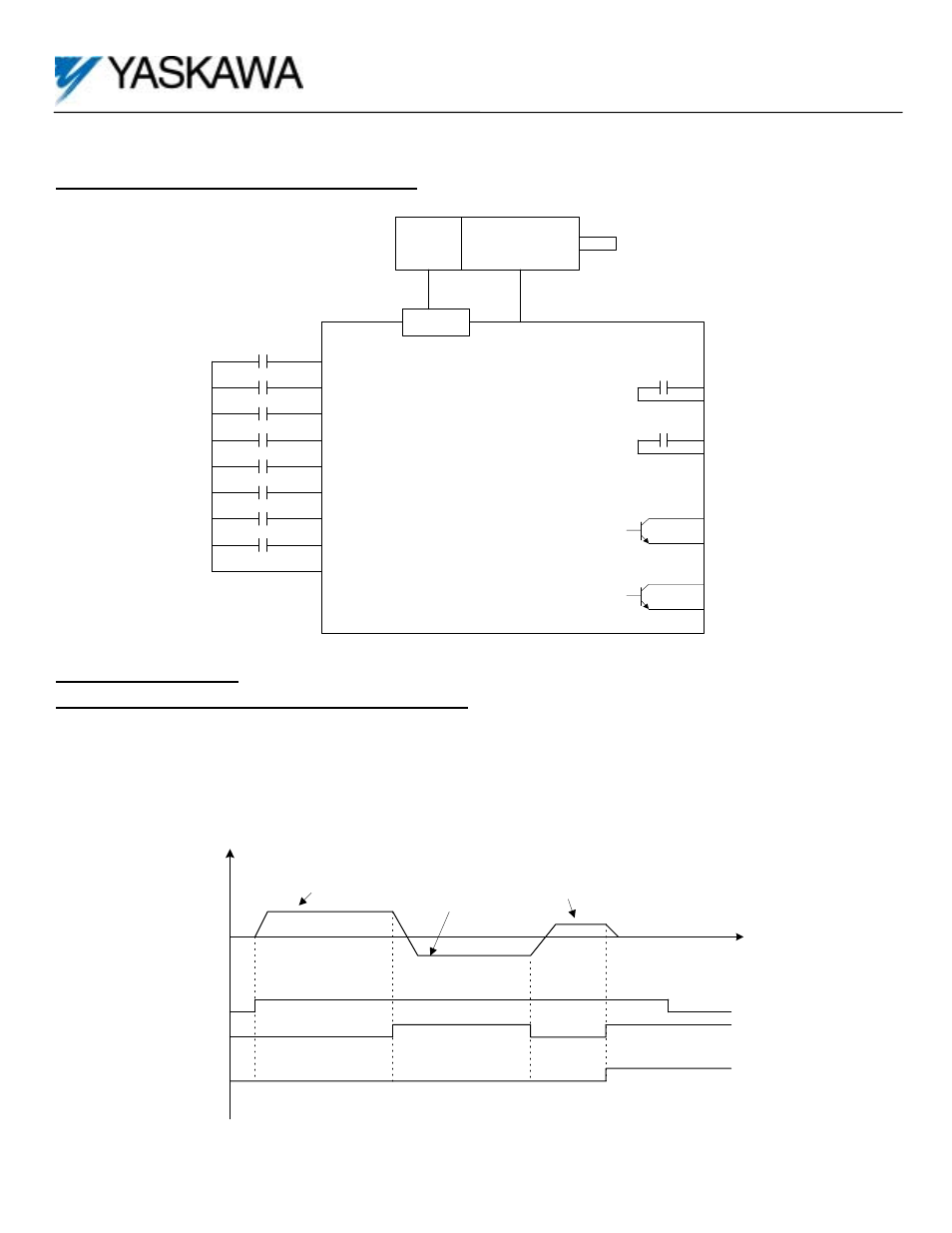
1.6 Typical Control Wiring Diagram
GPD515/G5
Controller
Encoder
PG-X2
1
Move Positive
INPUTS
O UTPUTS
2
7
3
Enable
4
Hom e switch
5
Hom e com m and
6
10
9
Move
Com plete
20
19
Drive
Fault
25
27
Move in
progress
Move Negative
Motor
T1-T2-T3
8
Drive Com m on
11
Multi-step ref #1
Multi-step ref #2
Multi-step ref #3
26
27
Hom e
Status
2.0 Timing Charts
2.1 Typical Homing Profile Timing Chart
Homing begins with movement in the direction (home accelerations and velocities) specified while looking for the home
limit switch. Once the home limit is found the specified edge of the limit is then sought out. (The home limit switch
polarity is also settable). Once the proper edge is found the home backup function can be used to reverse the motor and
re-approach the limit edge at the home final velocity (a separate value from the home velocity) until the edge is found
again.
(-) Speed (+)
Time
Typical Homing Profile
Homing Speed
Home command
Home Switch
Home Status
Home Final
Speed
Home BU
Speed
- Tag Generator (30 pages)
- MP3300iec (82 pages)
- 1000 Hz High Frequency (18 pages)
- 1000 Series (7 pages)
- PS-A10LB (39 pages)
- iQpump Micro User Manual (300 pages)
- 1000 Series Drive Option - Digital Input (30 pages)
- 1000 Series Drive Option - CANopen (39 pages)
- 1000 Series Drive Option - Analog Monitor (27 pages)
- 1000 Series Drive Option - CANopen Technical Manual (37 pages)
- 1000 Series Drive Option - CC-Link (38 pages)
- 1000 Series Drive Option - CC-Link Technical Manual (36 pages)
- 1000 Series Drive Option - DeviceNet (37 pages)
- 1000 Series Drive Option - DeviceNet Technical Manual (81 pages)
- 1000 Series Drive Option - MECHATROLINK-II (32 pages)
- 1000 Series Drive Option - Digital Output (31 pages)
- 1000 Series Drive Option - MECHATROLINK-II Technical Manual (41 pages)
- 1000 Series Drive Option - Profibus-DP (35 pages)
- AC Drive 1000-Series Option PG-RT3 Motor (36 pages)
- Z1000U HVAC MATRIX Drive Quick Start (378 pages)
- 1000 Series Operator Mounting Kit NEMA Type 4X (20 pages)
- 1000 Series Drive Option - Profibus-DP Technical Manual (44 pages)
- CopyUnitManager (38 pages)
- 1000 Series Option - JVOP-182 Remote LED (58 pages)
- 1000 Series Option - PG-X3 Line Driver (31 pages)
- SI-EN3 Technical Manual (68 pages)
- JVOP-181 (22 pages)
- JVOP-181 USB Copy Unit (2 pages)
- SI-EN3 (54 pages)
- SI-ET3 (49 pages)
- MECHATROLINK-III (35 pages)
- EtherNet/IP (50 pages)
- SI-EM3 (51 pages)
- 1000-Series Option PG-E3 Motor Encoder Feedback (33 pages)
- 1000-Series Option SI-EP3 PROFINET (56 pages)
- PROFINET (62 pages)
- AC Drive 1000-Series Option PG-RT3 Motor (45 pages)
- SI-EP3 PROFINET Technical Manual (53 pages)
- A1000 Drive Option - BACnet MS/TP (48 pages)
- 120 Series I/O Modules (308 pages)
- A1000 12-Pulse (92 pages)
- A1000 Drive Software Technical Manual (16 pages)
- A1000 Quick Start (2 pages)
- JUNMA Series AC SERVOMOTOR (1 page)
- A1000 Option DI-101 120 Vac Digital Input Option (24 pages)