Motion control, 2 command i/o table for 32 bit distance, 3 command i/o table for analog distance – Yaskawa G5 Motion Control User Manual
Page 4: 4 requirements, 5 wiring
Motion Control
Date: 08/18/04, Rev: 04-08
Page 4 of 22
TM.G5SW.020
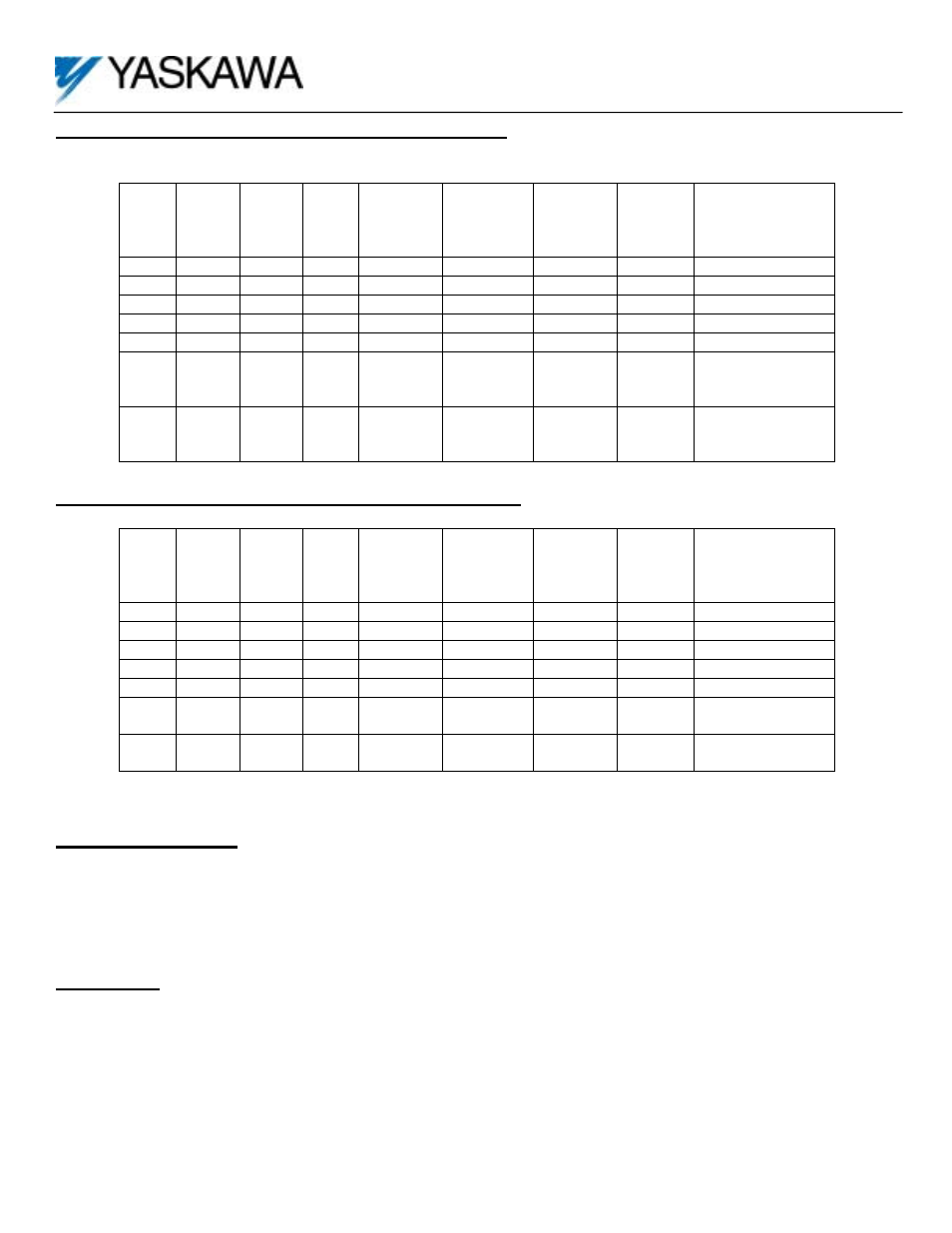
1.3.2 Command I/O Table for 32 bit distance
Command table with P1-03 = 1 (32 bit distance)
Move
Pos.
Term
#1
Move
Neg.
Term
#2
Enable
Servo
Home
Cmd
Multi
Step
Profile
Destination
source
Accel/
decel
Max
Speed
used
Action
of
motor
- - 0 - -
-
-
- Not
running
0 0 1 0 -
-
- zero
running
0 0 1 1 -
- C1-01,02
P2-02,03 Homing
1
0
1
0
0 0 0 0 0
-
C1-01,02
D1-09
Jog Positive
0
1
1
0
0 0 0 0 0
-
C1-01,02
D1-09
Jog Negative
1
0
1
0
0 0 0 0 1
Modbus
05A8 &
05A9
C1-01,02
D1-01
Move to pos
Value of modbus
05A8 &05A9
0
1
1
0
0 0 0 0 1
Modbus
05A8 &
05A9
C1-01,02
D1-01
Move to neg
Value of modbus
05A8 &05A9
1.3.3 Command I/O Table for analog distance
Command table with P1-03 = 2 (Analog distance)
Move
Pos.
Term
#1
Move
Neg.
Term
#2
Enable
Servo
Home
Cmd
Multi
Step
Profile
Destination
source
Accel/
decel
Max
Speed
used
Action
of
motor
- - 0 - -
-
-
- Not
running
0 0 1 0 -
-
- zero
running
0 0 1 1 -
- C1-01,02
P2-02,03 Homing
1
0
1
0
0 0 0 0 0
-
C1-01,02
D1-09
Jog Positive
0
1
1
0
0 0 0 0 0
-
C1-01,02
D1-09
Jog Negative
1
0
1
0
0 0 0 0 1
MF Analog
Input =21
C1-01,02
D1-01
Move to pos value
of Analog input
0
1
1
0
0 0 0 0 1
MF Analog
Input =21
C1-01,02
D1-01
Move to neg value
of Analog input
1.4 Requirements
- The inverter must be run in closed loop flux vector mode.
- The inverter requires a PG-X2 or PG-W2 encoder feedback board depending on application.
- A DI-08 or DI-16G may be required by the application.
- Do not use parameter F1-05 to change incremental encoder phasing in this software. Please swap
encoder signals A+ and A- instead.
1.5 Wiring
Wire the incoming power, motor, accessories and control wiring as specified in the GPD515/G5 Technical Manual
TM4515. If a second position feedback encoder is used it should be wired to terminals 10 through 16 according to the
PG-W2 instruction sheet. Absolute encoder is wired to the DI-16G card (Details below).
Note: The +12V supply on the PG-W2 card is capable of only 200mA, be sure not to overload it.