Motion control – Yaskawa G5 Motion Control User Manual
Page 17
Motion Control
Date: 08/18/04, Rev: 04-08
Page 17 of 22
TM.G5SW.020
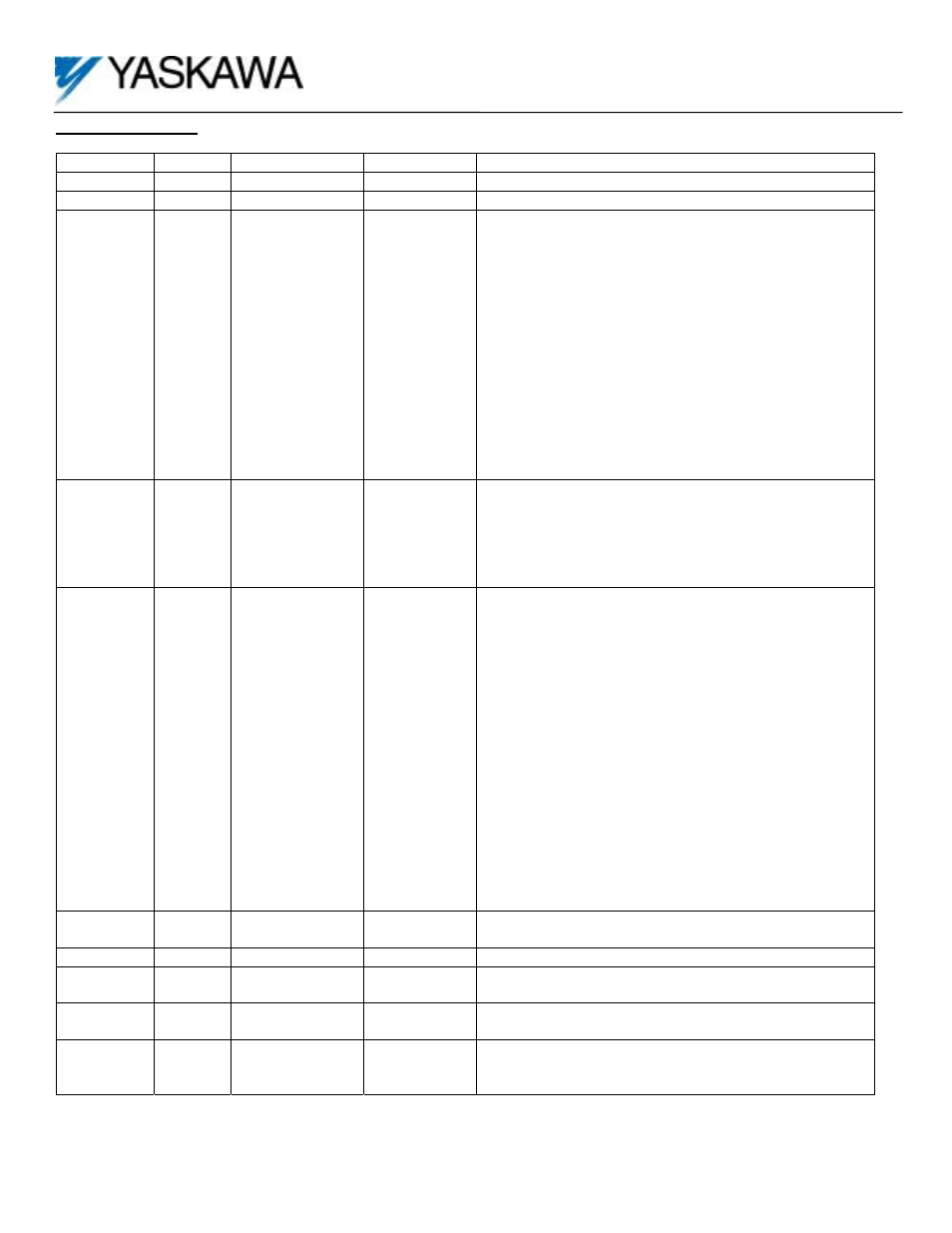
5.0 New Monitors
Parameter Modbus
Display
Digits
Description
U1-50
00d0
Destination
xxx.xx Unt
Displays the commanded destination in units.
U1-51
00d1
Speed Ref input
xxx.xx Hz
Displays the commanded speed reference.
U1-52
00d2
case_flag3
xxxxxH
Displays the hex value of an internal temporary flag
register for diagnostics and monitoring by external
computers.
home_sw_on bit 0
pos_ot_limit_tripped bit 1
neg_ot_limit_tripped bit 2
servo mode bit 3
home_sw_on2off bit 4
home_sw_off2on bit 5
case_pos direction bit 6
case_neg direction bit 7
home_command bit 8
position_command bit 9
jog_command bit 10
U1-53
00d3
case_flag4
xxxxxH
Displays the hex value of an internal retentive flag
register for diagnostics and monitoring by external
computers.
home_completed bit 0
home_sw_last_scan bit 1
prev_complete bit 2
U1-54
00d4
Active Block
xxxxx
Displays the active block of code or sub-routine in the
program. Used for diagnostics and monitoring by
external computers.
0 = no command
1 = no command
2 = zero servo
11= home positive
12= home back up
13= Home Final
14= Home stop
15= Home complete
21= position move distance. to go calculation
22= position move travel in progress
23= position move decel in progress
24= position move creep in progress
25= position move stop in progress
31= Jog in progress
U1-55 00d5 Speed
Ref
output
xxx.xxHz
Displays the speed reference coming out of the motion
software.
U1-56
00d6
Dist From Home
xxx.xx Units
Displays the distance from home in units.
U1-57
00d7
Dist to Go
xxx.xx Units
Displays the distance between where the machine is at
and where it is going.
U1-58
00d8
Counts to Go
xxxxx Counts
Displays the distance between where the machine is at
and where it is going in motor counts.
U1-59
ABS Encoder
Monitors machine position feedback from absolute
feedback encoder coming in on 18 bits of a DI-16H2
card.