3 nc parameter setup, Nc parameter setup – BECKHOFF ET9300 User Manual
Page 71
Application Note ET9300
69
object index Type
variable name
device
NC axis
0x6064
input
Actual position
“Enc_In” -> “nInData1”
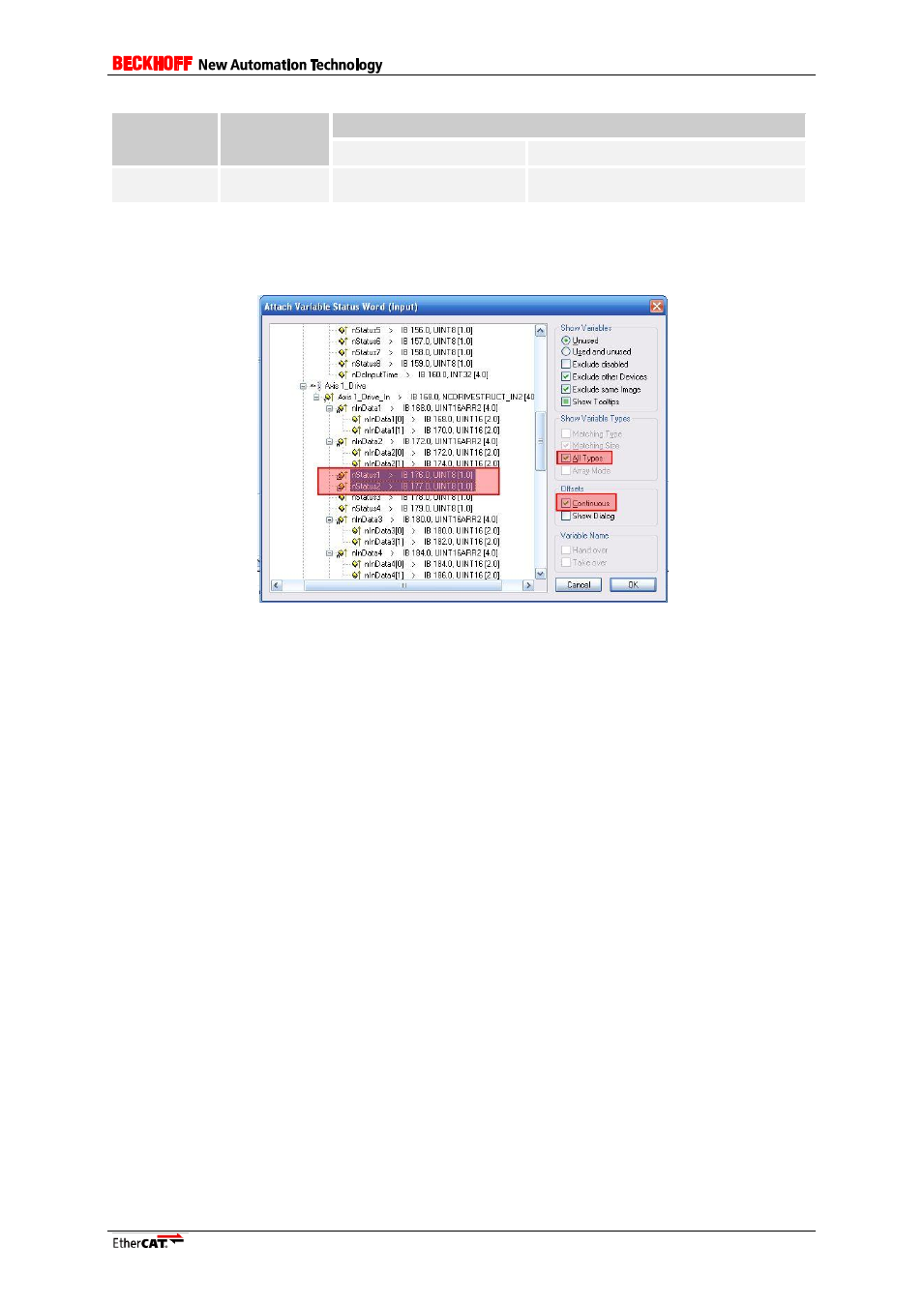
For the Stausword and Controlword continues process data mapping is required. This can be
performed in the linking window (eg. Statusword link window Figure 31). Enable
“All Types”,
“Continuous” and select the desired variables. TwinCAT will map “nStatus1” to the low byte and
“nStatus2” to the high byte of the Statusword.
Figure 31: Link multiple variables
10.4.3 NC parameter setup
It is required to setup the encoder and velocity output scaling in the NC-task of the EtherCAT master
according to the drive parameters. The sample implementation not supports user defined factor group
objects so the default units are used.
-
Position unit: inc
-
velocity unit: inc/s
-
Encoder resolution: 2^16 inc/rev
If a non-predefined drive is used two basic information are required, the target velocity value for
1rev/min (=> target velocity resolution) and the encoder resolution.
The encoder resolution defined as 2^16 inc/rev and if 1 rev is equal to 1mm the encoder scaling factor
[mm/inc] is 0.0000152588 (Figure 32).
Note: In TwinCAT 3 the parameter is called “Scaling Factor Numerator”.
Encoder scaling factor formula: enc.scaling = (mm/rev)/encoder resolution