10 cia402 drive profile, 1 objects, Cia402 drive profile – BECKHOFF ET9300 User Manual
Page 63: Objects, N 10.1objects
Application Note ET9300
61
10 CiA402 drive profile
Since version 4.30 the Slave Stack Code contains a sample implementation of the CiA402 drive profile
as described in [1] . This implementation provides the interface between the motion controller
application and communication layer.
Following features are supported:
-
CiA402 objects (see chapter 10.1 Objects)
-
CiA402 state machine (see chapter 10.2 State machine)
-
This implementation supports cyclic synchronous position (csp) and cyclic synchronous
velocity (csv) operation modes.
CiA402 specific files:
cia402appl.c : CiA402 drive profile implementation
cia402appl.h : Drive profile specific objects, definitions and axes structures
All motion controller related values are encapsulated in structure TCiA402Axis (file:
cia402appl.h). The configuration parameters and error codes are directly mapped to the
corresponding objects. The process data objects are updated in the input/output mapping functions
(file: ecatappl.c). Currently the sample supports maximum of two axes. The axes are initialized in
the EtherCAT state change from PREOP to SAFEOP.
The motion controller is a simple integration, which just copies the target values to the actual values
(see chapter 10.3 Operation modes).
10.1 Objects
All CiA402 specific objects are defined in file cia402appl.h.
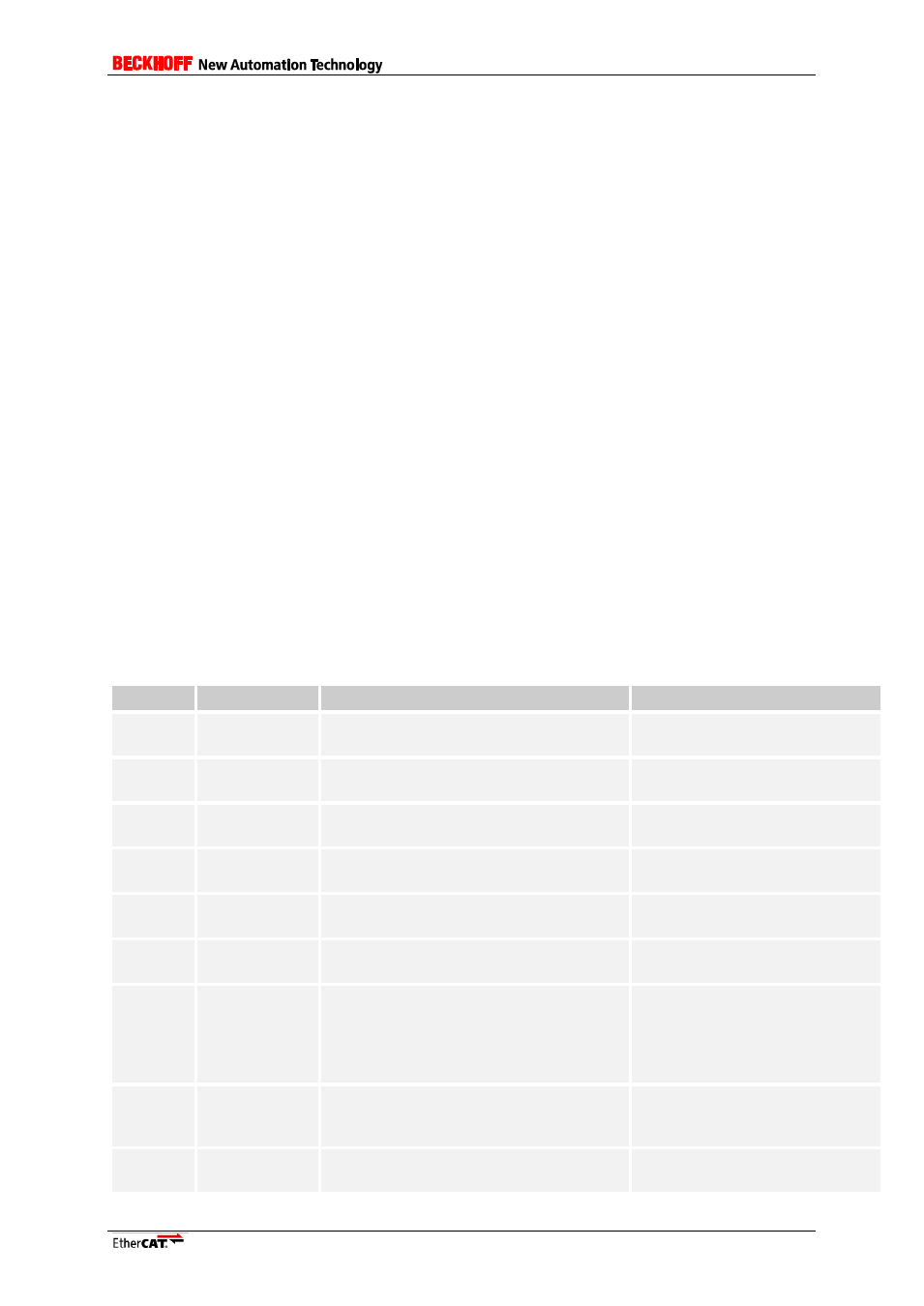
All mandatory and some optional object are defined in this sample implementation. Table 8 contains a
list of all defined objects. The object variables are located in the structure CiA402Objects.
Table 8: Object definitions in file
cia402appl.h
Index
Object name
Variable in source code
Comment/Description
0x1600
Rx PDOs
sRxPDOMap0
includes all objects required for
dynamic change between csv/csp
0x1601
Rx PDOs
sRxPDOMap1
includes objects required for csp
mode of operation
0x1602
Rx PDOs
sRxPDOMap2
includes objects required for csv
mode of operation
0x1A00
Tx PDOs
sTxPDOMap0
includes all objects required for
dynamic change between csv/csp
0x1A01
Tx PDOs
sTxPDOMap1
includes objects required for csp
mode of operation
0x1A02
Tx PDOs
sTxPDOMap2
includes objects required for csv
mode of operation
0x1C12
SyncManger 2
PDO assign
(Rx PDOs)
sRxPDOassign
this object is written in change
state from PREOP to SAFEOP;
the configuration depends on the
number of axes (not include in
CiA402Objects)
0x1C13
SyncManger 3
PDO assign
(Tx PDOs)
sTxPDOassign
equal to 0x1C12 (not include in
CiA402Objects)
0x603F
Error Code
objErrorCode
this value shall be set if an error
in the PDS occurs