Brookfield CAP2000 Viscometer User Manual
Page 33
Brookfield Engineering Labs., Inc.
Page 33
Manual No. M02-313-G0812
Note: All multiplication and division operations performed on any of the command values
should be done while the values in question are in their decimal (base 10) form (i.e.
before any conversion to hexadecimal).
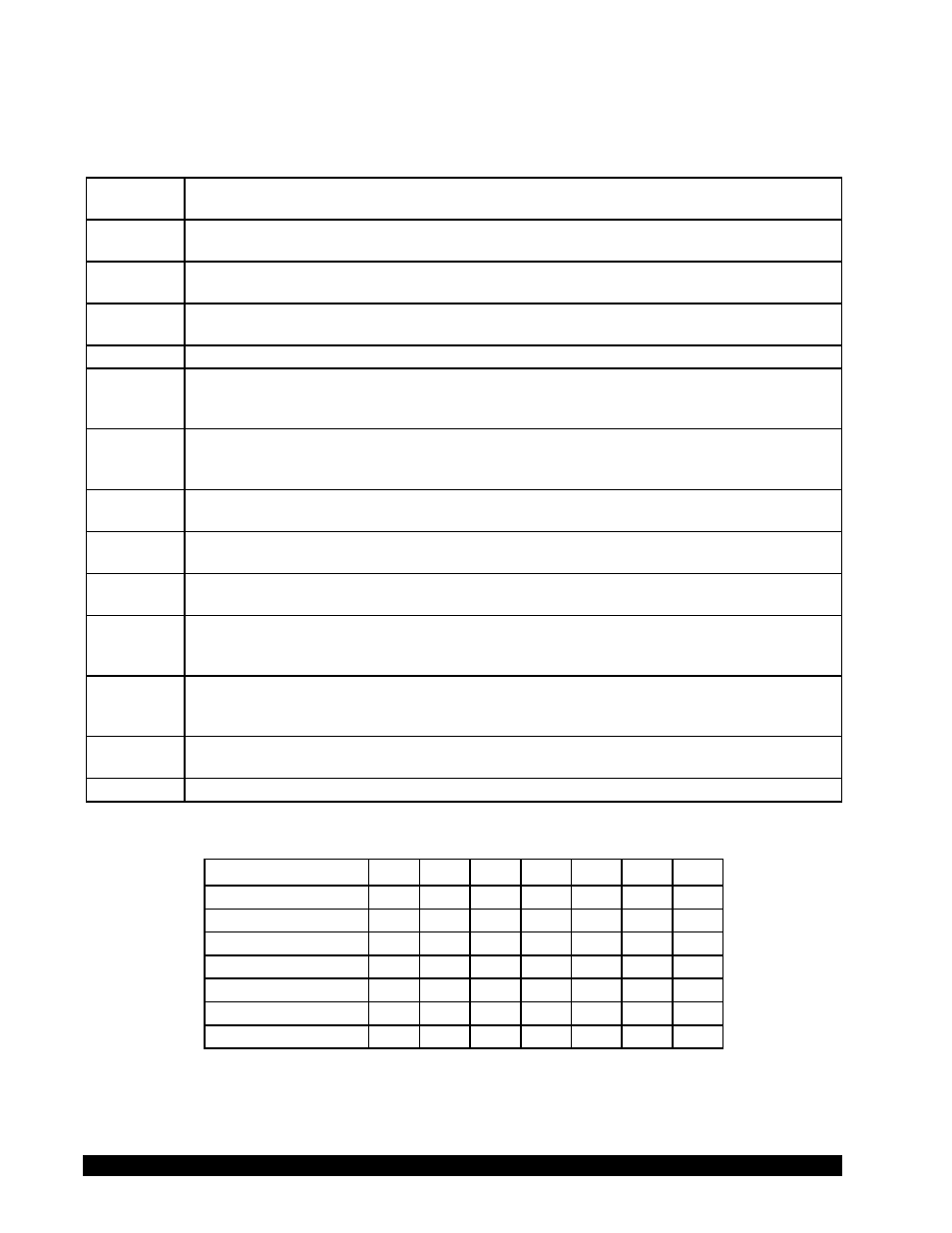
LEGEND
Command
Description
Cone multiplier constant (hexadecimal). All cone multiplier constant values are six characters padded
with leading zeros.
(HI / LO) Indicates whether the instrument operates in the high (0°C to 235°C) temperature range or
the low (5°C to 75°C) temperature range.
Cone number (hexadecimal); all cone number are two characters padded with leading zeroes. All cone
values are two characters padded with leading zeroes.
Carriage return
Spring Constant (hexadecimal). The Spring Constant must be multiplied by 10,000 before transmis-
sion by the CAP 2000+. Use the base Spring Constant for the model, not an adjusted constant after
calibrating.
Shear rate constant of a cone to be calibrated (hexadecimal). The CAP 2000+ must divide shear rate
constants by 10000 after they are received, and multiply shear rate constants by 10000 before sending
them out. All shear rate constant values are six characters padded with leading zeroes.
% FSR (hexadecimal). % FSR values are multiplied by 100 before transmission from the CAP 2000+.
All FSR values are four characters padded with leading zeroes.
Shear rate (1/seconds) values (hexadecimal). Shear rate values are multiplied by 100 before transmis-
sion by the CAP 2000+. All shear rate values are six characters padded with leading zeroes.
Status byte, returned in hexadecimal format, see Table 2 for complete description. All status bytes are
two characters padded with leading zeroes.
Temperature (°C) sent to or from the CAP 2000+ (hexadecimal). The CAP 2000+ must divide all tem-
perature values received by 10, and multiply all temperature values sent by 10. All temperature inputs
are three characters padded with leading zeroes.
Viscosity (P) sent to or from the CAP 2000+ (hexadecimal). The CAP 2000+ must divide all viscos-
ity values received by 1000, and multiply all viscosity values sent by 1000; all viscosity values are six
characters padded with leading zeroes.
Firmware version number, in decimal format, multiplied by 100 by CAP 2000+ before transmission
(i.e. for firmware version 2.15, xxx would be 215).
Speed (RPM) input (hexadecimal). All speeds are three characters padded with leading zeroes.
INTERPRETATION OF BYTE STATUS
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1
Motor Off
x
x
x
x
x
x
0
Motor On
x
x
x
x
x
x
1
Over SFR (>=115.0%)
1
x
x
x
x
x
1
x
Valid FSR (<115.0%)
x
x
x
x
x
0
x
Value Outside Limits
2
x
x
x
x
1
x
x
Value Within Limits
x
x
x
x
0
x
x
Calibration Error
1
3
x
x
x
x
x
x