Dji ronin assistant app tuning – DJI Ronin User Manual
Page 20
20
©
2014 DJI. All Rights Reserved.
Ronin
User Manual
DJI Ronin Assistant App Tuning
?
Gimbal
Control
Viewer
More
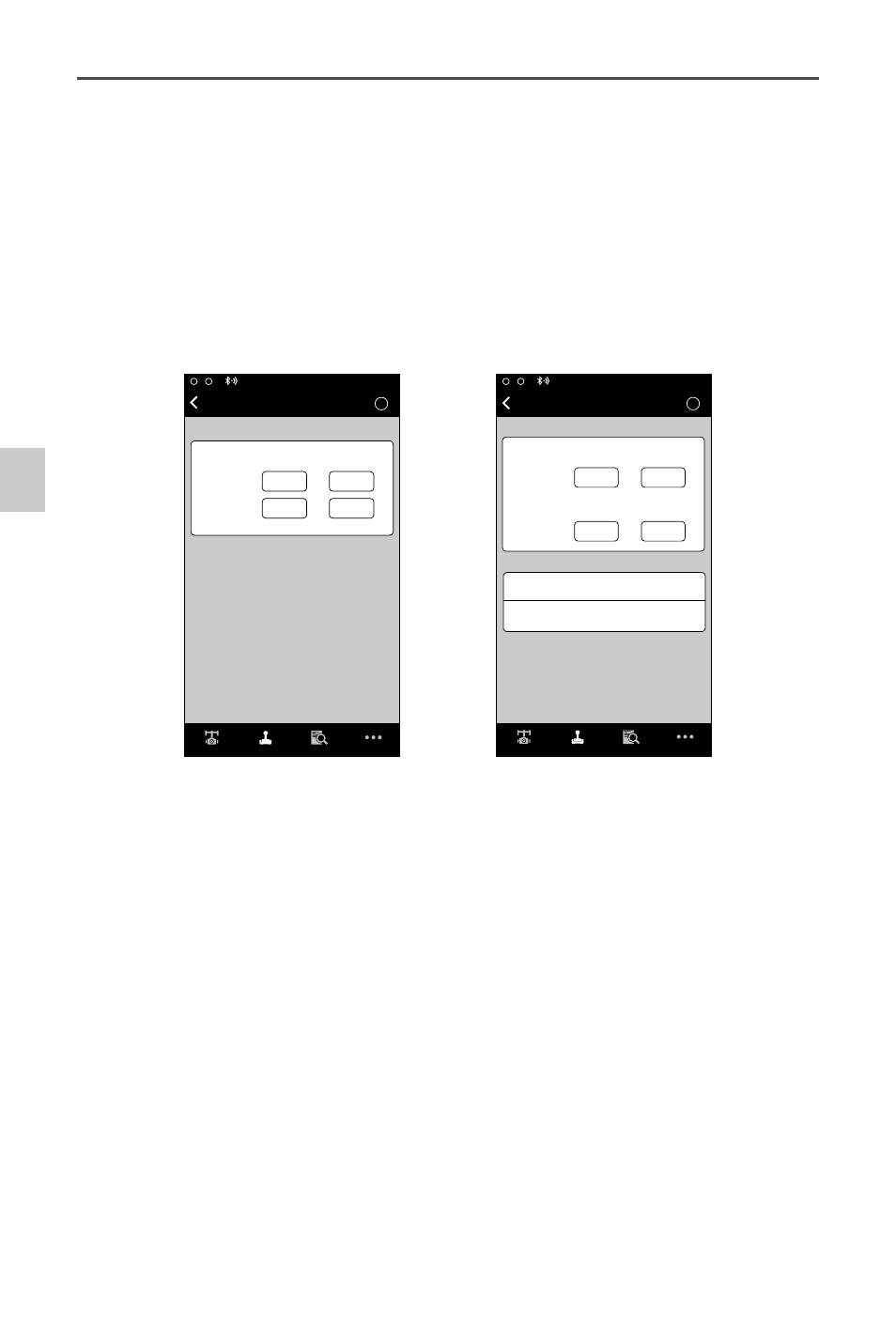
Smoothing Adjustment
Onboard
Controller
Remote
Operator
Pan
Tilt
Control
Smoothing
15
15
15
15
?
Gimbal
Control
Viewer
More
N/A
Mode:
Test Pan Endpoints
Test Tilt Endpoints
Endpoint Adjustments
Test
Pan Axis
Left
Right
Up
Down
Tilt Axis
Control
Endpoint
0
0
0
0
3. Controller Smoothing
When the control stick input is released, the smoothing of the translated movement will come to a
smooth slow down if the smoothing is increased. If the smoothing is 0, the slowdown will appear as an
abrupt stop. The onboard controller and remote operator control sticks can be set independently. Pan
and tilt smoothing can also be set independently.
4. Controller Endpoints Adjustment
Pan Axis endpoints can be adjusted independently for left and right movement when used with a
remote control or the onboard controller. Pan Axis endpoints setting means during controller input, the
maximum point in which the gimbal will rotate left or right.
If the requirement to rotate 360 degrees on the Pan axis is needed, simply adjust the endpoints for pan to 0.
If endpoints are set to 0 for 360 degree Pan ability, then "Test Pan Endpoint" will not move the pan axis.
Tilt Axis endpoints can be adjusted independently for up and down movement when used with a
remote control or the onboard controller. Tilt Axis endpoints setting means during controller input, the
maximum point in which the gimbal will rotate up or down.
The Pan and Tilt endpoints can be tested. Ensure there is no obstruction of the camera when tapping
the Test buttons.
2. Controller Maximum Speed
Maximum Speed is a function that allows the controlled stick response from being a linear response
to what is known as an increasing response curve. This means the amount of gimbal travel in the Pan
or Tilt is not directly proportional to control stick travel. Control response can be adjusted to be milder
below the initial first half of control stick travel and be increased to a higher speed towards the last
half of control stick travel. This preset exponential curve is selected based off the input of maximum
speed. The onboard controller and the remote operator control sticks can have maximum speeds set
independently from each other.