Rockwell Automation 9329 Drive Application Software Inertia Comp Imperial Units User Manual
Page 13
FM – Inertia Compensation
Drive Application Software – page 13 of 28
The inertia and losses torque return parameter is computed as the sum of inertia
torque, friction torque and windage torque.
Two conventions are used to avoid confusion when applying signal polarities to
translational speed signals, rotational speed signals, and torque signals.
1. Positive torque produces positive rotational speed
2. Positive rotational speed results in positive line speed
A reverse rotation input parameter, allows the second convention to be reversed. In
other words, positive rotational speed results in negative line speed. This function is
necessary for center winder applications with over wind and under wind capability.
Typically, reverse direction is associated with under wind. With the reverse rotation
input parameter set true, the inertia and losses torque resulting from the line speed
reference must be negated. It is important to note that this negation is only applied to
the per-unit inertia and losses torque return parameter.
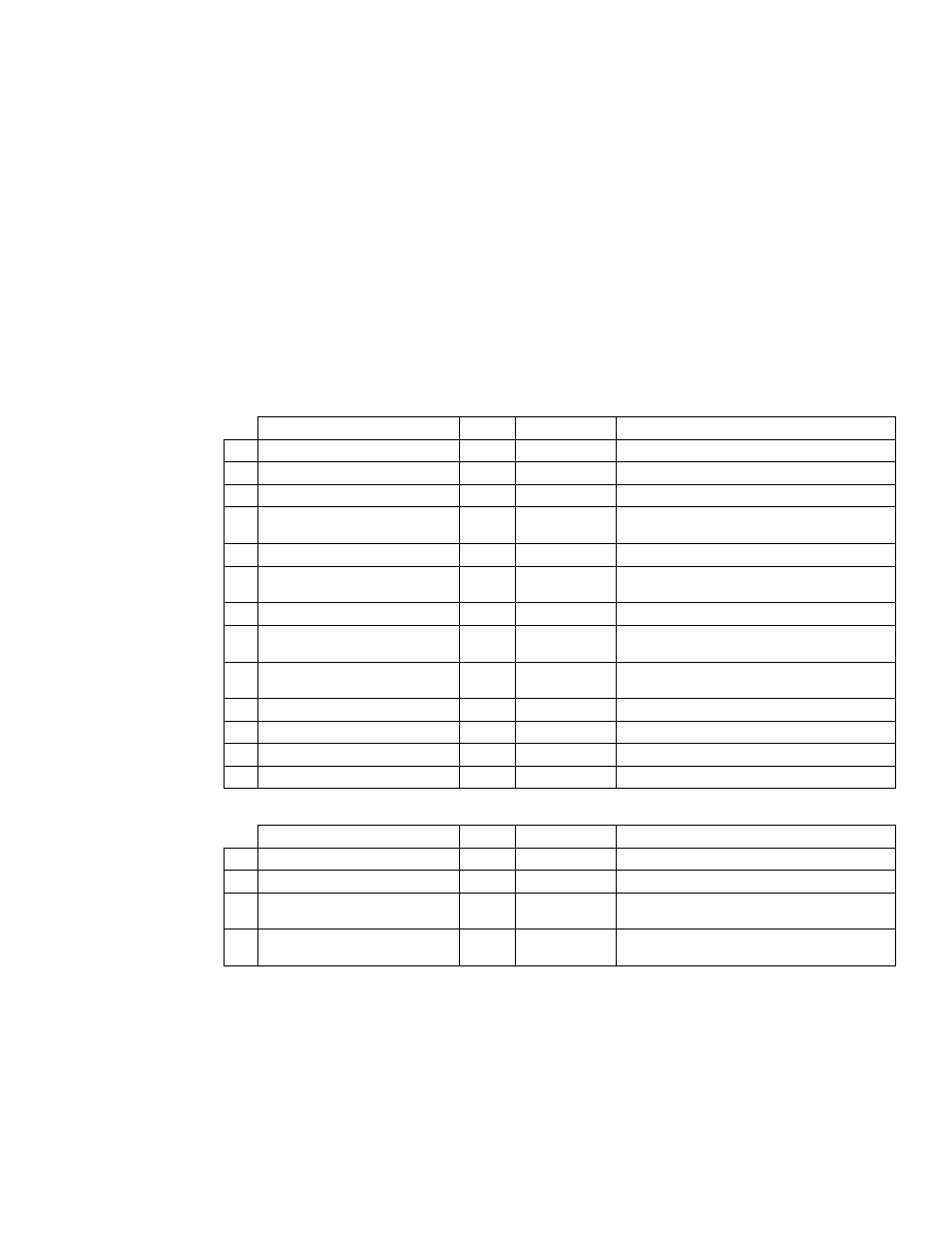
Input Parameters
Name
Type
Range
Description
1 LineSpdRf_FPM
REAL
NA
Line Speed Reference
2 LineSpdRfRate_FPMsec
REAL
NA
Line Speed Reference Rate
3 JDiffEnbl
BOOL
0 to 1
Enable Differentiator
4 JDiffSamples
INT
1 to 20
Number of Differentiator
Moving Average Samples
5 BuildUpRatio
REAL
NA
Normalized Diameter
6 Constant_RPMPerFPM
REAL
NA
Translational-to-Rotational Conversion
Constant
7 J_sec
REAL
NA
Total Reflected Inertia
8 JGainQuad1Quad2
REAL
0.1 to 3.0
Inertia Compensation Gain
Quadrant 1 and 2
9 JGainQuad3Quad4
REAL
0.1 to 3.0
Inertia Compensation Gain
Quadrant 3 and 4
10 Friction_Pct
REAL
0.0 to 50.0 Friction Loss
11 Windage_PctRPM
REAL
0.00 to 1.00 Windage Loss
12 MtrTrqRated_lbft
REAL
NA
Rated Motor Torque
13 ReverseRotation
BOOL
0 to 1
Reverse Rotation
Return Parameters
Name
Type
Range
Description
1 TrqRfJ_Pct
REAL
NA
Torque Reference Inertia Part
2 TrqRfLoss_Pct
REAL
NA
Torque Reference Losses Part
3 TrqRfJLoss_Pct
REAL
NA
Torque Reference Inertia and Losses
Part
4 DrvTrqRfJLoss_PU
REAL
NA
Drive Torque Reference Inertia and
Losses Part