Fine-tuning the loops, Fine-tuning the loops -3 – Rockwell Automation 1746-BTM Barrel Temperature Control Module User Manual User Manual
Page 43
Publication 1746-UM010B-EN-P - April 2001
Setting Autotune and Gains Values 4-3
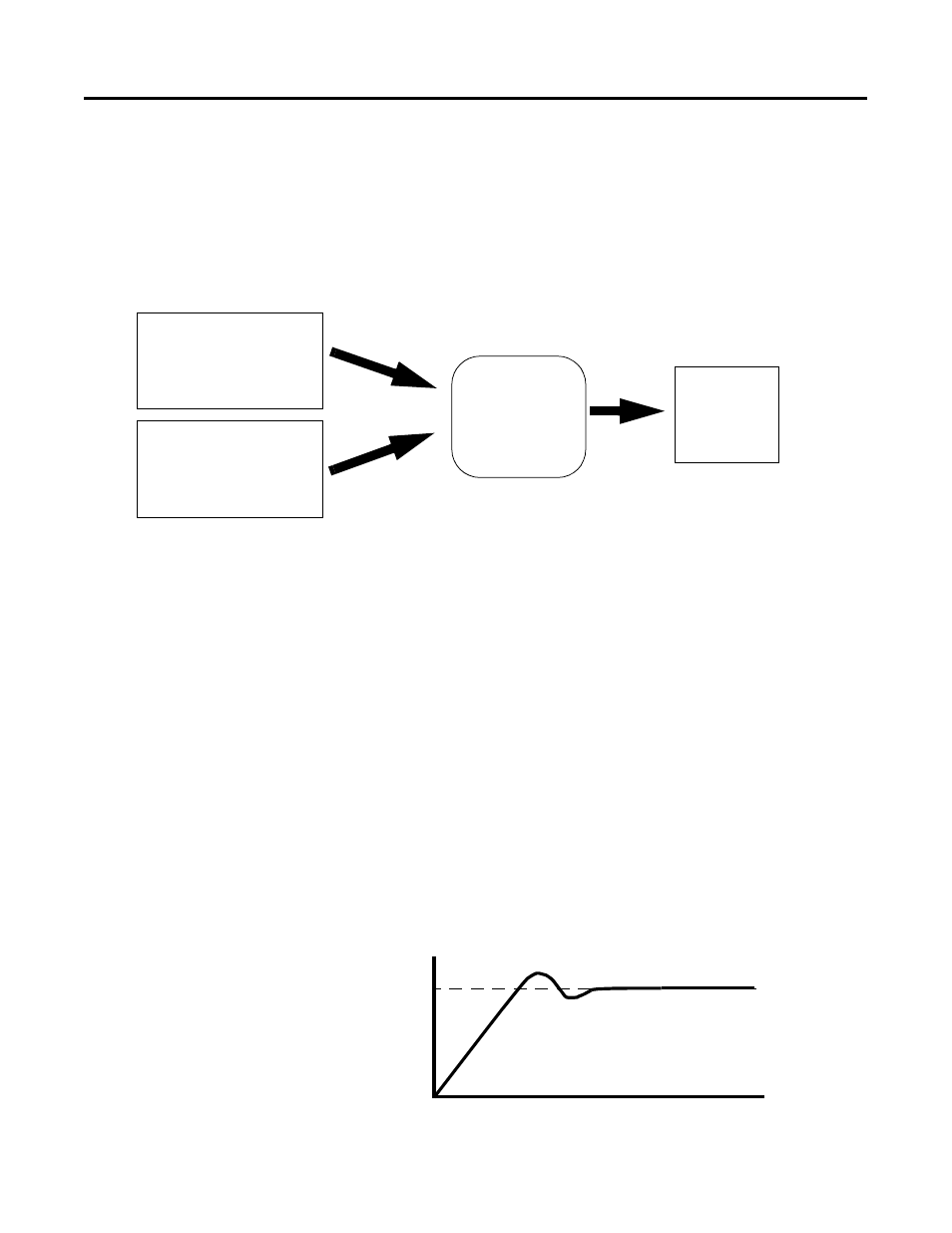
Whenever you write autotune values to the module, it recalculates
PID gains based on measured system parameters stored in the
autotune block and your selection of low, medium, or high PID gain
level stored in the latest configuration block. If you changed the level
of PID gains selection in the configuration block in the mean time, the
PID gains calculated would be different from those calculated
originally.
Fine-Tuning the Loops
After autotuning, you may want to fine–tune the loops by manually
setting the gains. As you fine–tune a loop, first try adjusting the
proportional gain; this will have the greatest impact. Your second
choice for adjustment should be the integral gain. The derivative gain
should be the last choice for fine–tuning a loop.
If the loop over–shoots the set point either at start–up or at a change
of set point, (See Figure 4.1) you may be able to dampen the loop
response by doing one or more of the following (in order of
effectiveness):
1. decrease the proportional gain
2. decrease the integral gain
3. increase the derivative gain
Figure 4.1 Loop Over-shoot
Configuration Block
Your selection of PID gains level:
•
low
•
medium
•
high
Autotune Block
System parameters
Autotuning
Calculations
Gains Block
PID gains
Set Point