5 process controller (l_pctrl), Process controller (l_pctrl), Function library lenzedrive.lib – Lenze DDS Function library Drive User Manual
Page 89: Special functions
Function library LenzeDrive.lib
Special functions
2.7.5
Process controller (L_PCTRL)
2−79
L
LenzeDrive.lib EN 1.7
2.7.5
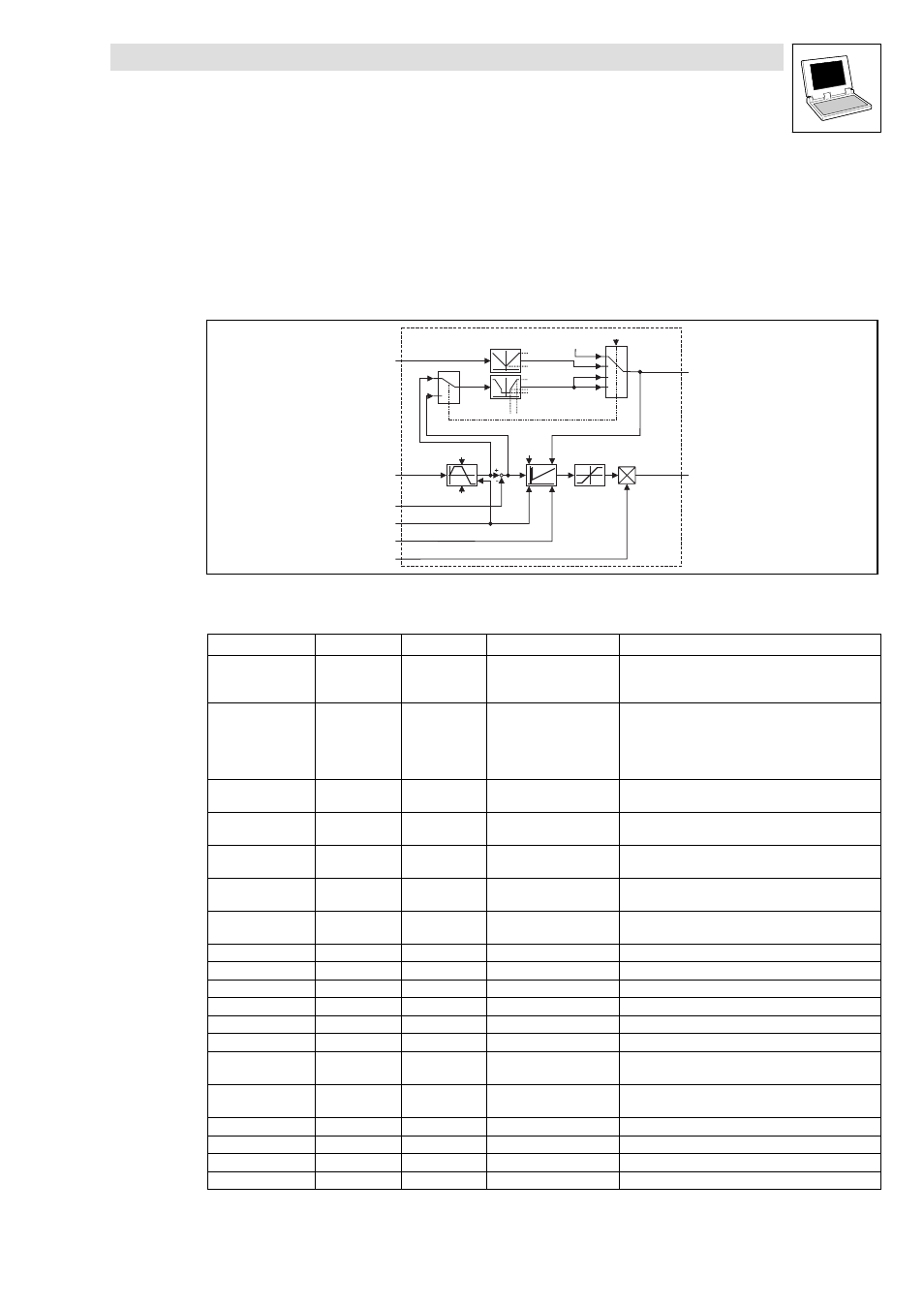
Process controller (L_PCTRL)
This FB is used, for instance, as a higher−level controller (dancer position controller, tension
controller, pressure controller, etc.).
Setpoint and actual value are sent to the process controller via the corresponding inputs and
processed according to the selected control algorithm (PID−, PI− or P−algorithm).
L _ P C T R L
± 1 6 3 8 4
R E S E T
n A d a p t _ a
V p 2
V p
n S e t _ a
n A c t _ a
b I n A c t _ b
b I O f f _ b
n I n f l u _ a
d n T i r
d n T i f
2
3
s o l l 1
s o l l 2
V p
V p 2
V p 3
n S e t 1 A d a p t
n V p 2 A d a p t
3
2
1
0
b y P C h a r a c t e r i s t i c
n V p
b B i U n i p o l a r
d n T n
n K d
n O u t _ a
n V p
n V p
n V p 2 A d a p t
n V p 3 A d a p t
n S e t 2 A d a p t
n A c t V p
Fig. 2−75
Process controller (L_PCTRL)
VariableName
DataType
SignalType
VariableType
Note
nAdapt_a
Integer
analog
VAR_INPUT
Gain V
p
·
Value range: ±32767
·
You can alter the gain online.
nSet_a
Integer
analog
VAR_INPUT
Input of the process setpoint.
·
Range of possible values: ±32767
·
The rate of change of step−change signals can be
slowed by using the ramp generator (with dnTir
and dnTif).
nAct_a
Integer
analog
VAR_INPUT
Actual value input
·
Value range:
±32767
bInAct_b
Bool
binary
VAR_INPUT
Deactivation of the process controller.
·
You can carry out this function online.
bIOff_b
Bool
binary
VAR_INPUT
Set I−component to 0.
·
You can carry out this function online.
nInflu_a
Integer
analogs
VAR_INPUT
Evaluation or suppression of the output signal.
·
Value range: ±32767
nOut_a
Integer
analog
VAR_OUTPUT
Output signal. Value range
±16384 (bipolar), or
0 ... 16384 (unipolar)
nActVp
Integer
−
VAR_OUTPUT
Shows the actual gain.
nVp
Integer
−
VAR CONSTANT RETAIN
Gain V
p
(10
º 1.0)
dnTn
Double integer
−
VAR CONSTANT RETAIN
Integral−action time T
n
(20
º 20 ms)
nKd
Integer
−
VAR CONSTANT RETAIN
Differential component Kd (10
º 1.0)
nVp2Adapt
Integer
−
VAR CONSTANT RETAIN
Vp2 − process controller adaptation (64
º 1.0)
nVp3Adapt
Integer
−
VAR CONSTANT RETAIN
Vp3 − process controller adaptation (64
º 1.0)
nSet1Adapt
Integer
−
VAR CONSTANT RETAIN
Set1 − process controller adaptation (16384
º 100.00
%)
nSet2Adapt
Integer
−
VAR CONSTANT RETAIN
Set2 − process controller adaptation (16384
º 100.00
%)
byPCharacteristic
Byte
−
VAR CONSTANT RETAIN
Function selection for the provision of the P−gain
dnTir
Double integer
−
VAR CONSTANT RETAIN
Acceleration time T
ir
(1000
º 1.000 s)
dnTif
Double integer
−
VAR CONSTANT RETAIN
Deceleration time T
if
(1000
º 1.000 s)
bBiUnipolar
Bool
−
VAR CONSTANT RETAIN
Value range of the output signal