6 integration (l_phint), Integration (l_phint), Function library lenzedrive.lib – Lenze DDS Function library Drive User Manual
Page 53: Processing of phase−angle signals, 1 constant input value
Function library LenzeDrive.lib
Processing of phase−angle signals
2.4.6
Integration (L_PHINT)
2−43
L
LenzeDrive.lib EN 1.7
2.4.6
Integration (L_PHINT)
This FB can integrate a speed or a velocity to a phase−angle (path/distance). The integrator can
accept max. ±32000 encoder revolutions.
n I n _ v
b R e s e t _ b
d n O u t _ p
b F a i l _ b
L _ P H I N T
± 3 2 0 0 0
R e v o l u t i o n
I n t e r v a l T i m e
T A S K
Fig. 2−54
Integration (L_PHINT)
VariableName
DataType
SignalType
VariableType
Note
nIn_v
Integer
velocity
VAR_INPUT
Actual speed value: 16384
º 15000 rpm
bReset_b
Bool
binary
VAR_INPUT
TRUE sets the phase−angle integrator = 0 and
bFail_b = FALSE .
dnOut_p
Double−integer
position
VAR_OUTPUT
65536 inc = 1 encoder revolution (Overflow is possible.)
bFail_b
Bool
binary
VAR_OUTPUT
TRUE = Overflow occurred.
Range of functions
·
Constant input value
·
Calculation of the output signal
2.4.6.1
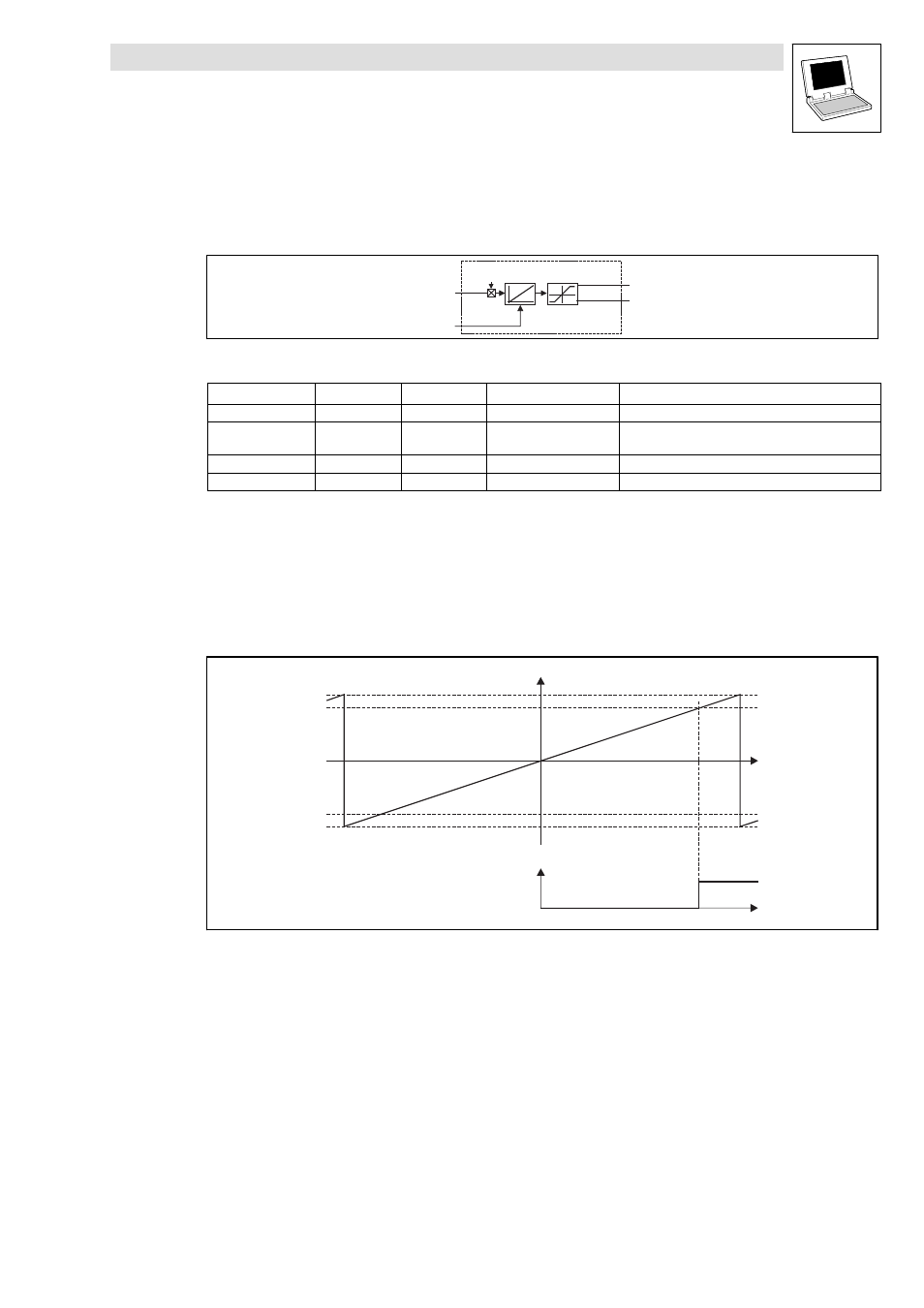
Constant input value
dnOut_p
t
-32767 revolutions
-32000 revolutions
+32000 revolutions
+32767 revolutions
bFail_b
t
Fig. 2−55
Function of L_PHINT with constant input value
·
A positive signal at nIn_v is incremented (the counter value is increased at every call of the
function).
·
A negative signal at nIn_v is decremented (the counter value is decreased at every call of the
function).
·
dnOut_p produces the count value of the bipolar integrator.
·
If the count exceeds the value of +32000 encoder revolutions, then
bFail_b switches = TRUE.
·
If the count exceeds the value of +32767 encoder revolutions (corresponds to +2147483647
inc.) there is an overflow, and the count procedure continues from a value of −32768 encoder
turns.