Velocity loop, Position loop, Velocity loop 4.8.3. position loop – ElmoMC ExtrIQ Digital Servo Drives-Panther User Manual
Page 77
Panther Installation Guide
Technical Specifications
MAN-PANIG (Ver. 1.302)
77
4.8.2.
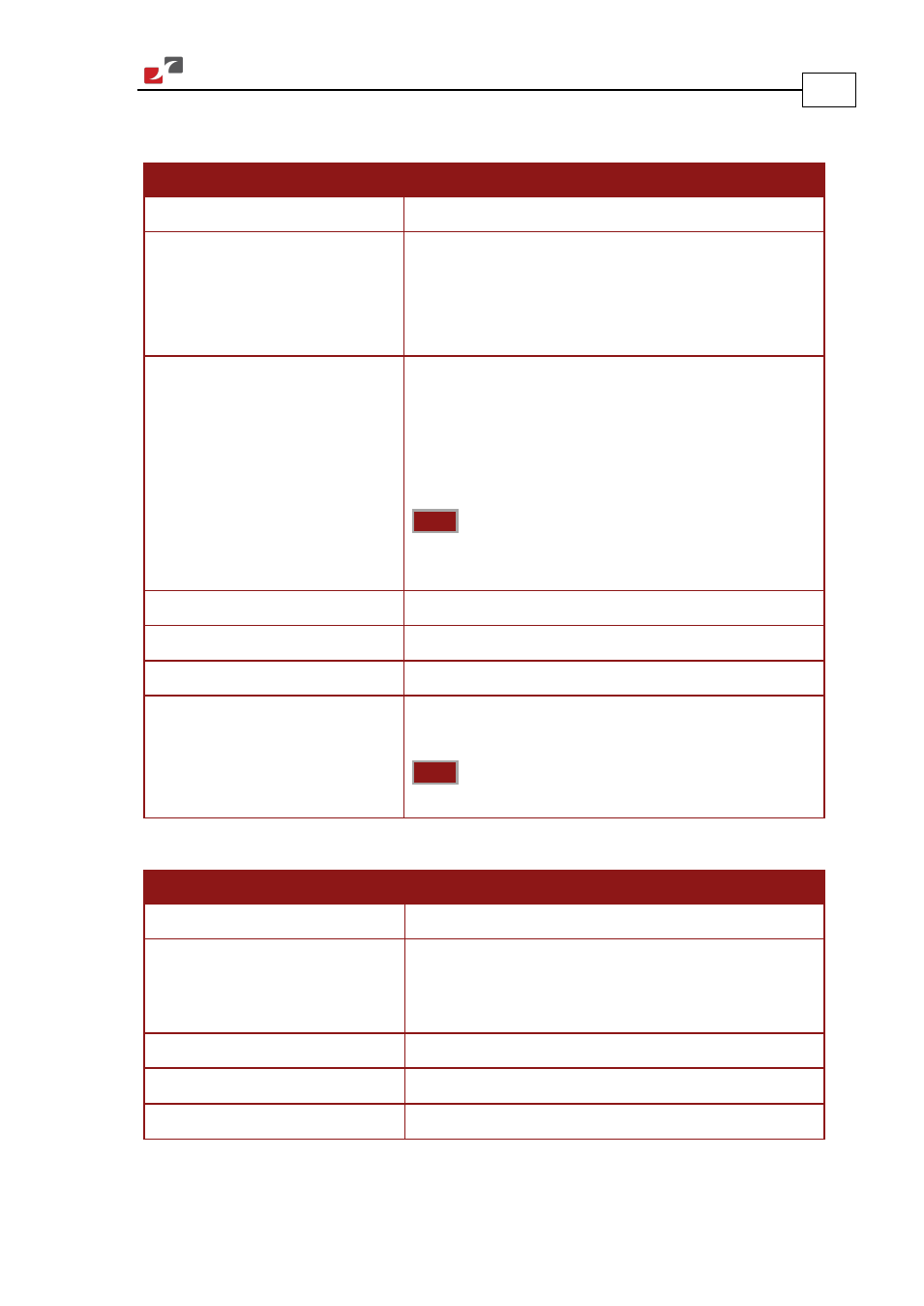
Velocity Loop
Feature
Details
Controller type
PI
Velocity control
•
Fully digital
•
Programmable PI and FFW control filters
•
On-the-fly gain scheduling
•
Automatic, manual and advanced manual tuning
Velocity and position feedback
options
•
Incremental Encoder
•
Digital Halls
•
Interpolated Analog (Sine/Cosine) Encoder (optional)
•
Resolver (optional)
•
Tachometer and Potentiometer (optional)
Note:
With all feedback options, 1/T with automatic
mode switching is activated (gap, frequency and
derivative).
Velocity loop bandwidth
< 350 Hz
Velocity loop sampling time
140 - 200 µsec (twice the current loop sample time)
Velocity loop sampling rate
Up to 8 kHz; default 5.5 kHz
Velocity command options
•
Analog
•
Internally calculated by either jogging or step
Note:
All software-calculated profiles support on-the-fly
changes.
4.8.3.
Position Loop
Feature
Details
Controller type
“1-2-4” PIP
Position command options
•
Software
•
Pulse and Direction
•
Analog Potentiometer
Position loop bandwidth
< 80 Hz
Position loop sampling time
280 - 400 µsec (four times the current loop sample time)
Position loop sampling rate
Up to 4 kHz; default 2.75 kHz