NOVUS N120/N125 CONTROLLER User Manual
Page 13
13
0691
Psp1
Setpoint 1 of Program 1 (R&S)
Range: same as in psp0.
0692
Psp2
Setpoint 2 of Program 1 (R&S)
Range: same as in psp0.
0693
Psp3
Setpoint 3 of Program 1 (R&S)
Range: same as in psp0.
0694
Psp4
Setpoint 4 of Program 1 (R&S)
Range: same as in psp0.
0695
Psp5
Setpoint 5 of Program 1 (R&S)
Range: same as in psp0.
0696
Psp6
Setpoint 6 of Program 1 (R&S)
Range: same as in psp0.
0697
Psp7
Setpoint 7 of Program 1 (R&S)
Range: same as in psp0.
0698
Psp8
Setpoint 8 of Program 1 (R&S)
Range: same as in psp0.
0699
Psp9
Setpoint 9 of Program 1 (R&S)
Range: same as in psp0.
0700
Reserved
Internal use
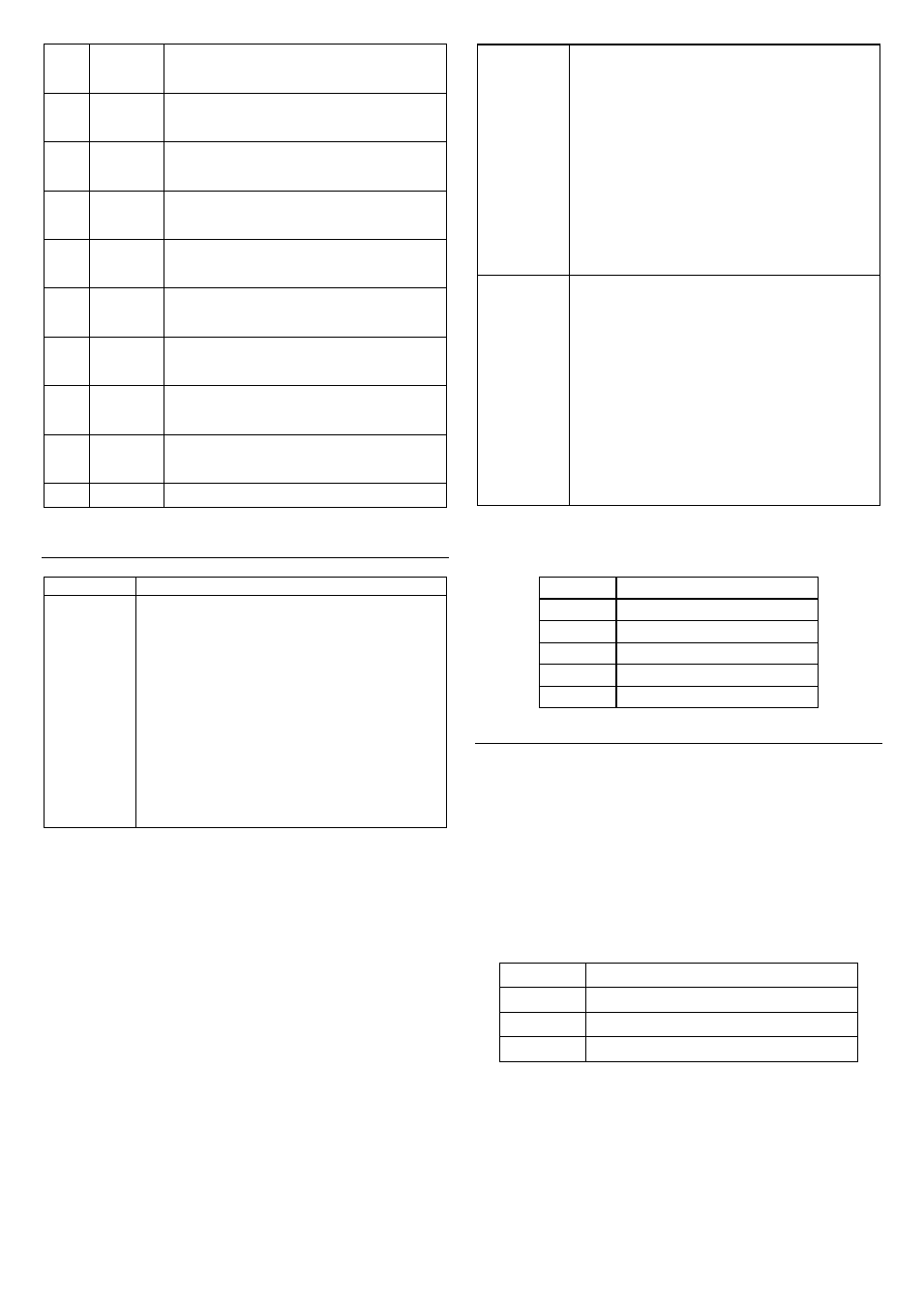
1.4 STATUS WORDS
Register
Value format
Status Word 1
bit 0 – Alarm 1 (0-inactive; 1-active)
bit 1 – Alarm 2 (0-inactive; 1-active)
bit 2 – Alarm 3 (0-inactive; 1-active)
bit 3 – Alarm 4 (0-inactive; 1-active)
bit 4 – Input 0 – I/O 5 (0- inactive; 1- active)
bit 5 – Input 1 – I/O 3 (0- inactive; 1- active)
bit 6 – Input 2 – I/O 4 (0- inactive; 1- active)
bit 7 – Reserved
bit 8 – Hardware detection value
bit 9 – Hardware detection value
bit 10 – Reserved
bit 11 – Reserved
bit 12 – Reserved
bit 13 – Reserved
bit 14 – Reserved
bit 15 – Reserved
Status Word 2
bit 0 – Automatic (0- manual; 1- automatic)
bit 1 – Run (0-stop; 1-run)
bit 2 – Control Action (0-direct; 1-reverse)
bit 3 – Reserved
bit 4 – Auto-tune (0-no; 1-yes)
bit 5 – Alarm 1 power-up inhibit (0-no; 1-yes)
bit 6 – Alarm 2 power-up inhibit (0-no; 1-yes)
bit 7 – Alarm 3 power-up inhibit (0-no; 1-yes)
bit 8 – Alarm 4 power-up inhibit (0-no; 1-yes)
bit 9 – Unit (0-°C; 1-°F)
bit 10 – Reserved
bit 11 – Output 1 status
bit 12 – Output 2 status
bit 13 – Output 3 status
bit 14 – Output 4 status
bit 15 – Output 5 status
Status Word 3
bit 0 – Very low PV conversion (0-no; 1-yes)
bit 1 – Negative conversion after calibration (0-no; 1-yes)
bit 2 – Very high PV conversion (0-no; 1-yes)
bit 3 – Exceeded linearization limit (0-no; 1-yes)
bit 4 – Very high Pt100 cable resistance (0-no; 1-yes)
bit 5 – Self zero conversion out of range (0-no; 1-yes)
bit 6 – Self span conversion out of range (0-no; 1-yes)
bit 7 – Reserved
bit 8 – Reserved
bit 9 – Reserved
bit 10 – Reserved
bit 11 – Reserved
bit 12 – Reserved
bit 13 – Reserved
bit 14 – Reserved
bit 15 – Reserved
Table 2: Values of Status Words
Writing to an output bit is only possible if the output has no function assigned to it (the
output is configured to OFF in Alarm Cycle).
Coil Status
Output description
0
Output 1 Status (I/O1)
1
Output 2 Status (I/O2)
2
Output 3 Status (I/O3)
3
Output 4 Status (I/O4)
4
Output 5 Status (I/O5)
1.5
EXCEPTION RESPONSES – ERROR CONDITIONS
The MODBUS RTU protocol checks the CRC in the data blocks received. Reception
errors are detected by the CRC, causing the controller to discard the packet, not sending
any reply to the master.
After receiving an error-free packet, the controller processes the packet and verifies
whether the request is valid or not, sending back an exception error code in case of an
invalid request. Response frames containing error codes have the most significant bit of
the Modbus command set.
If a WRITE command sends an out-of-range value to a parameter, the controller will
clamp the value to the parameter range limits, replying with a value that reflects these
limits (maximum or minimum value allowed for the parameter).
The controller ignores broadcast READ commands; the controller processes only
broadcast WRITE commands.
Error Code
Error Description
01
Invalid Command
02
Invalid Register Number or out of range
03
Invalid Register Quantity or out of range
Table 3 – Exception response error codes