5 cal offsets, Cal offsets – PNI SENtral User Manual
Page 34
PNI Sensor Corporation
Doc #1018049 R03
SENtral Technical Data Sheet
Page 33
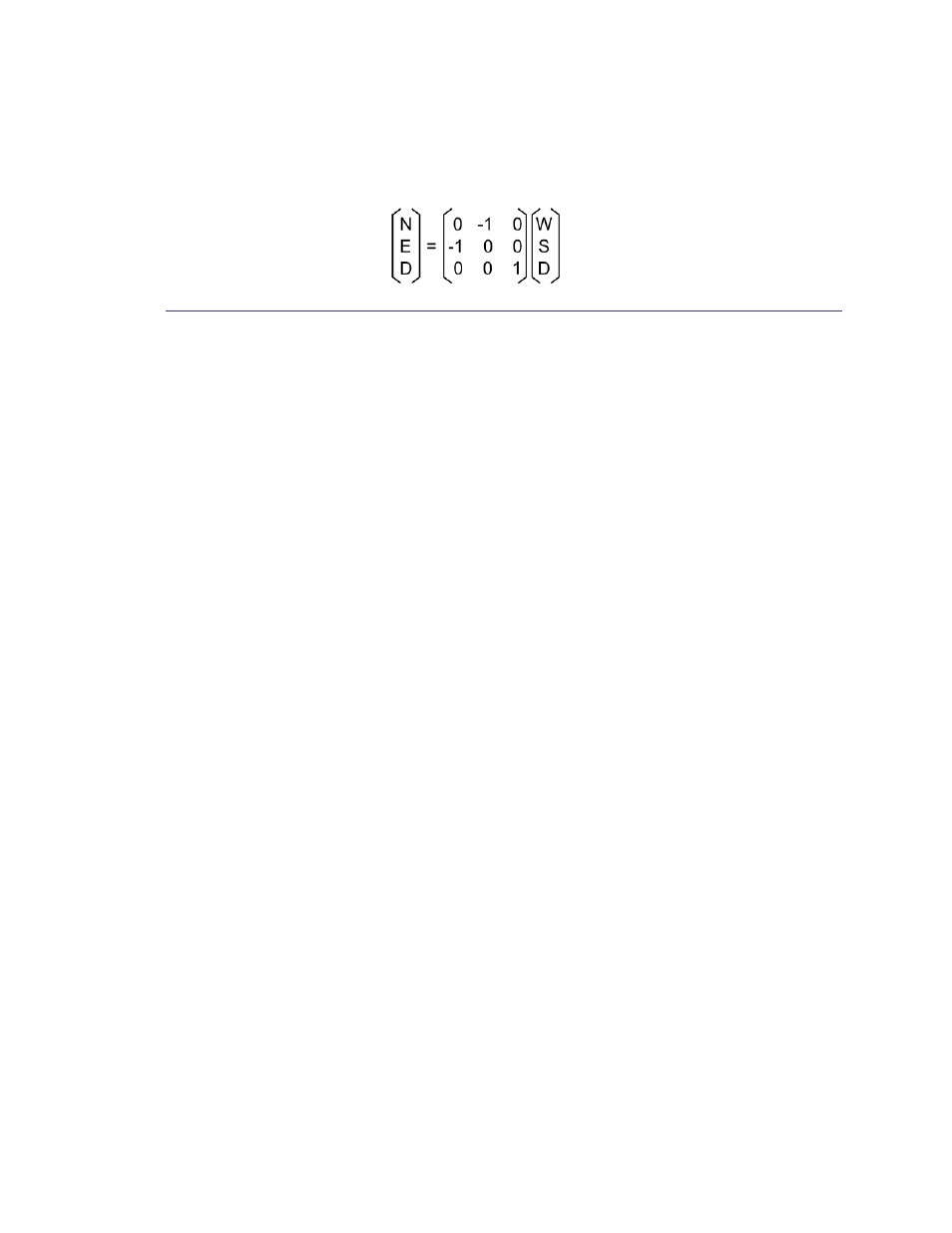
The final example is west-south-down (WSD). This matrix would be appropriate for
an ENU accelerometer, since it incorporates the -1 multiplication factor. The
orientation matrix and associated matrix math are given below.
6.2.5
Cal Offsets
Normally these fields will be ‘0’. However if the user has information indicating a given
model of sensor consistently has a fixed measurement offset, then these fields allow the
user to tailor the SENtral algorithm. For example, assume statistical data from a
manufacturer regarding their accelerometer indicates their z-axis sensor has an average
reading of 1.1 g when actually experiencing 1.0 g of gravitational force. In this case, the
user can enter an offset on the z-axis of 0.1g for the accelerometer. The fields are given
in X, Y, Z order, and the units are as follows:
Magnetometer:
1.0 = +50
T
Accelerometer:
1.0 = +1 g
Gyroscope:
1.0 = +1 radian/second