2 cpureset, 3 read results, Cpureset – PNI SENtral User Manual
Page 25: Read results, Table 5-6: results registers, On 5.3.2
PNI Sensor Corporation
Doc #1018049 R03
SENtral Technical Data Sheet
Page 24
5.3.2
CPUReset
SENtral will report a CPUReset event after the ResetReq command has been issued, and
prior to uploading the Configuration File. In this case, SENtral is in Unprogrammed
State and needs the Configuration File to be uploaded. If a dedicated EEPROM is used
to store the Configuration File, then CPUReset should not be encountered as the
Configuration File is automatically uploaded.
5.3.3
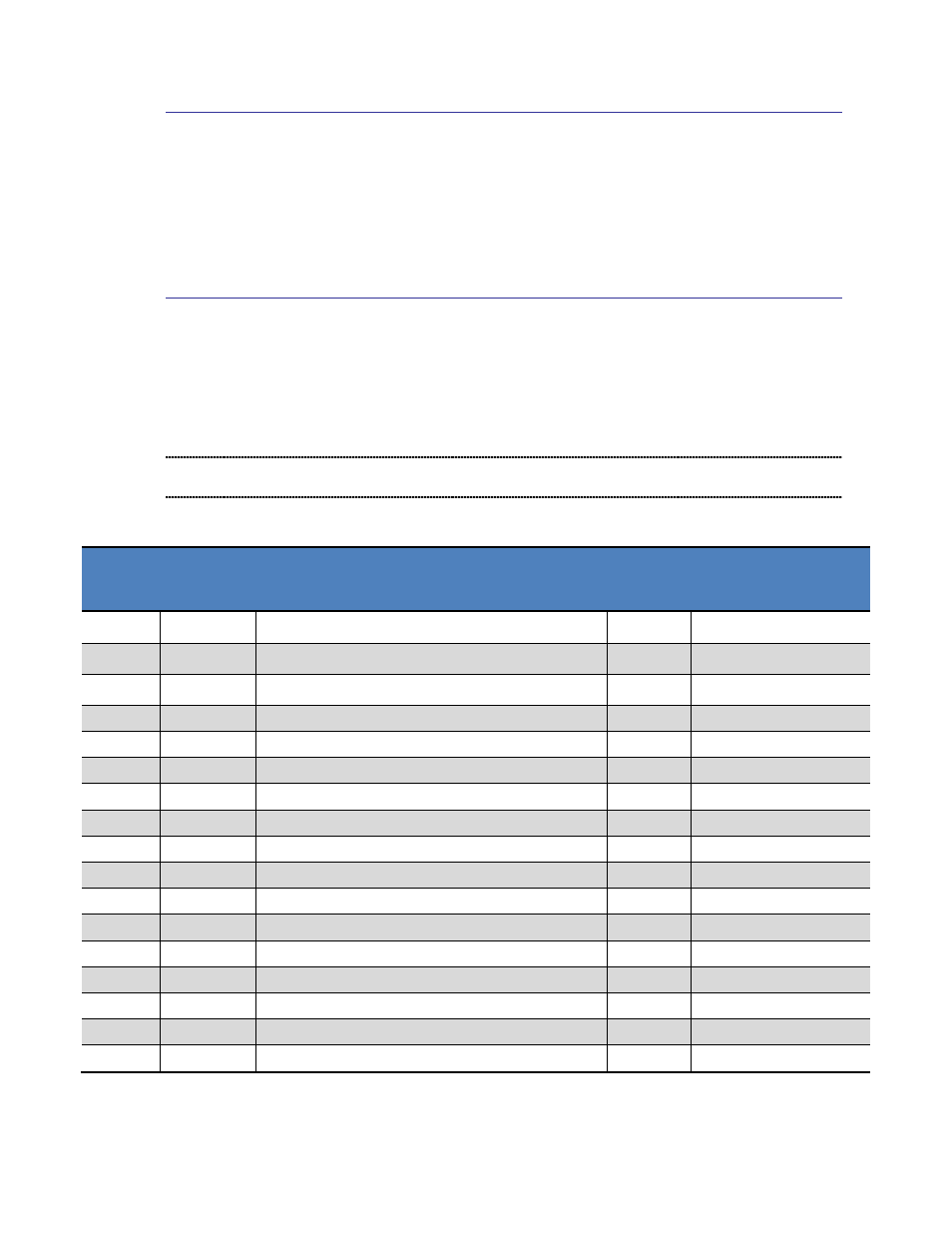
Read Results
The Results Registers’ addresses, formats, and full-scale ranges are given below in Table
5-6. For an explanation of how to convert quaternions to the rotation vector, the rotation
matrix, or heading, pitch, and roll (Euler angles), see Appendix II – Converting
Quaternions. The resolution is 32 kHz for all timestamps.
Note: All multi-byte elements are stored and transmitted using the Little Endian convention: the
least significant byte is stored at the lowest address and transmitted first over the I
2
C bus.
Table 5-6: Results Registers
Name
Address
(Hex)
Description
Format
Full-Scale Range
QX
00
– 03
Normalized Quaternion
– X, or Heading
Float32
0.0
– 1.0, or ±
QY
04
– 07
Normalized Quaternion
– Y, or Pitch
Float32
0.0
– 1.0, or ±
/2
QZ
08
– 0B
Normalized Quaternion
– Z, or Roll
Float32
0.0
– 1.0, or ±
QW
0C
– 0F
Normalized Quaternion
– W, or 0.0
Float32
0.0
– 1.0
QTime
10
– 11
Quaternion Data Timestamp
UInt16
0
– 2048 msec
MX
12
– 13
Magnetic Field
– X Axis, or Raw Mag Data
Int16
±1000 µT when scaled
MY
14
– 15
Magnetic Field
– Y Axis, or Raw Mag Data
Int16
±1000 µT when scaled
MZ
16
– 17
Magnetic Field
– Z Axis, or Raw Mag Data
Int16
±1000 µT when scaled
MTime
18
– 19
Magnetometer Interrupt Timestamp
UInt16
0
– 2048 msec
AX
1A
– 1B
Linear Acceleration
– X Axis, or Raw Accel Data
Int16
±16 g when scaled
AY
1C
– 1D
Linear Acceleration
– Y Axis, or Raw Accel Data
Int16
±16 g when scaled
AZ
1E
– 1F
Linear Acceleration
– Z Axis, or Raw Accel Data
Int16
±16 g when scaled
ATime
20
– 21
Accelerometer Interrupt Timestamp
UInt16
0
– 2048 msec
GX
22
– 23
Rotational Velocity
– X Axis, or Raw Gyro Data
Int16
±5000°/s when scaled
GY
24
– 25
Rotational Velocity
– Y Axis, or Raw Gyro Data
Int16
±5000°/s when scaled
GZ
26
– 27
Rotational Velocity
– Z Axis, or Raw Gyro Data
Int16
±5000°/s when scaled
GTime
28
– 29
Gyroscope Interrupt Timestamp
UInt16
0.0
– 2.048 sec