4 orientation matrix, Examples, Orientation matrix – PNI SENtral User Manual
Page 33
PNI Sensor Corporation
Doc #1018049 R03
SENtral Technical Data Sheet
Page 32
technical data sheet and normally will be a function of 5 or 6 fixed bits and 1 or 2 bits
that are configurable by 1 or 2 of the sensor’s pins.
6.2.4
Orientation Matrix
This matrix defines how the sensors are physically laid out in the host system. The
values are normally 1s, -1s, or 0s. The matrix is used to convert the physical layout into a
north-east-down (NED) convention, where “north” is defined as the line-of-sight or
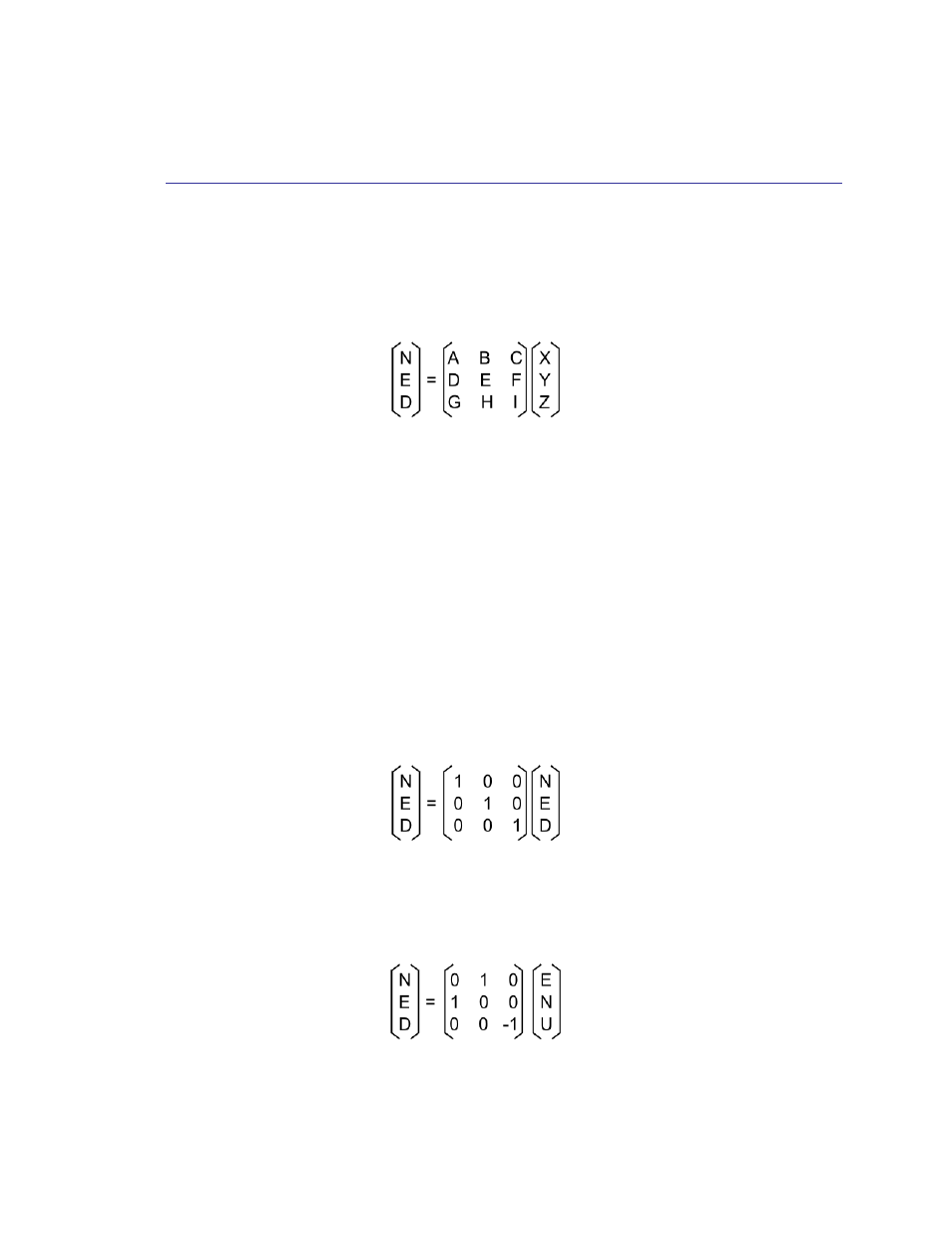
direction of travel. The matrix is defined as shown in the equation below:
where A through I are the matrix values that need to be populated (1s or 0s), X, Y, and Z
represent the orientation of the x-axis, y-axis, and z-axis sensors, where north is defined
as the line of sight, and NED is the north-east-down convention that the orientation
matrix converts [X, Y, Z] into.
For the accelerometer matrix, it is necessary to multiply the matrix by –1.
Examples:
Below are three examples. The first is if the sensor is laid out in an NED convention,
such that the x-axis points north, the y-axis points east, and the z-axis points down.
Recall that “north” is defined as the line-of-sight or direction of travel. In this case
the orientation matrix is the identity matrix, as given below.
Another common convention is east-north-up (ENU), where the x-axis points east,
the y-axis points north, and the z-axis points up, in which case the orientation matrix
and associated matrix math are given below.