Speed proportional control – Toshiba TOSVERT VF-S11 User Manual
Page 40
E6581222
38
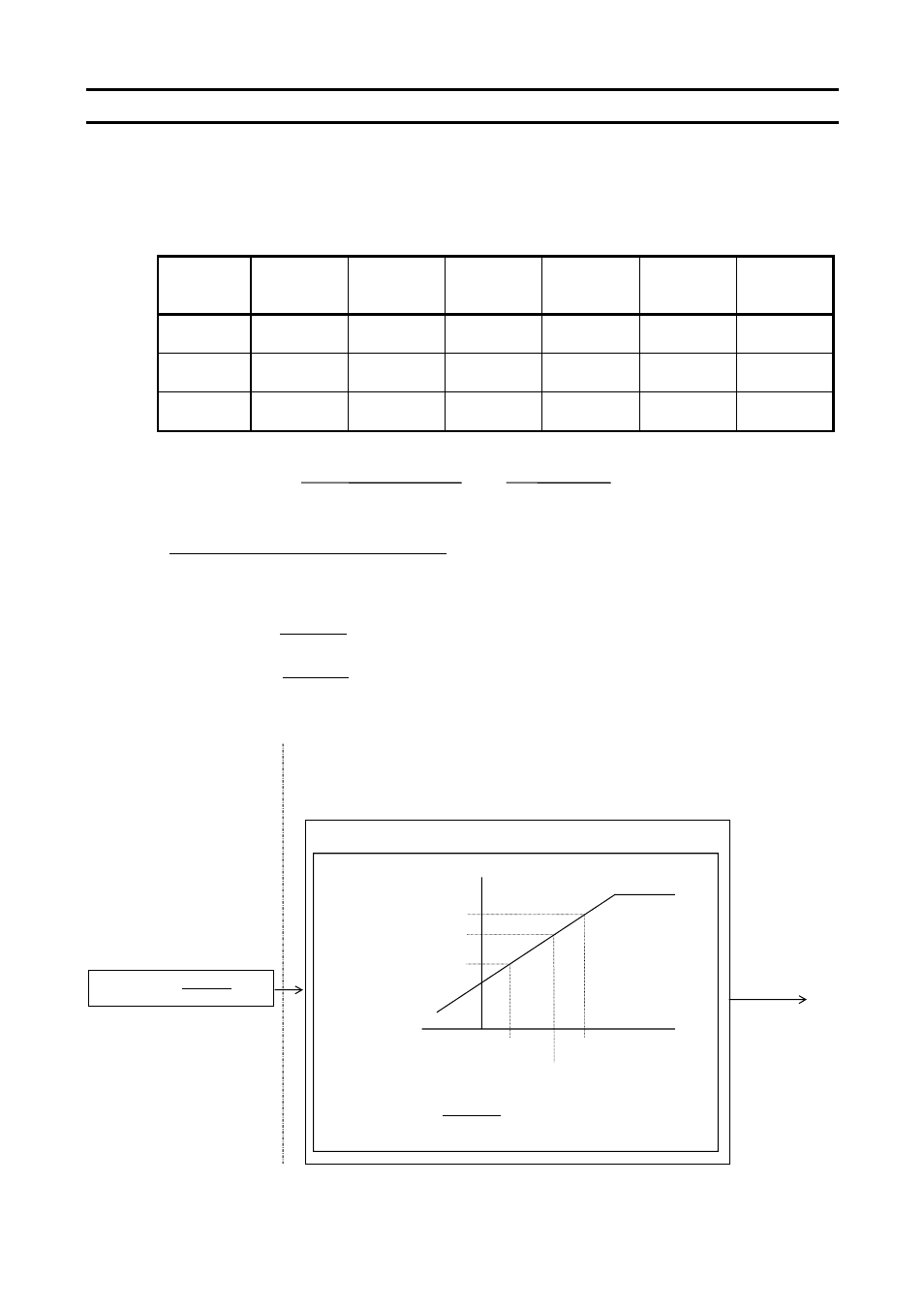
6.1. Speed proportional control
Various inclinations can be set by frequency point setting.
The frequency command value on the slave side during inter-drive communication can be expressed
by the following formulas.
If inter-drive communication is not selected (=), point conversion is not performed.
Point conversion is performed only when the command “S” is received.
(Ex.) < unit > Frequency unit: 1=0.01(Hz), point setting unit: 1=0.01%
Maximum
frequency
()
Point 1
setting
()
Point 1 fre-
quency
()
Point 2
setting
()
Point 2
frequency
()
Frequency
(Fc)
Master (Fc)
100.00Hz
(10000)
50.00Hz
(5000)
Slave 1
100.00Hz
(10000)
0.00%
(0)
0.00Hz
(0)
100.00%
(10000)
90.00Hz
(9000)
45.00Hz
(4500)
Slave 2
100.00Hz
(10000)
0.00%
(0)
0.00Hz
(0)
100.00%
(10000)
80.00Hz
(8000)
40.00Hz
(4000)
Sending data from the master:
Master send fc(%) = = = 5000 = 50%
Slave frequency Command(Hz)=
1(F811)
point
-
2(F814)
Point
F812)
frequency(
1
Point
-
F813)
frequency(
2
Point
x (Master command (%) - Point 1(F811)) + Point 1 frequency(F812)
By the point conversion process,
Hz
45
4500
0
0
5000
0
10000
0
9000
Hz
fc
:
1
Slave
=
=
)
−
(
×
−
−
=
)
(
Hz
40
4000
0
0
5000
0
10000
0
8000
Hz
fc
:
2
Slave
=
=
)
−
(
×
−
−
=
)
(
Diagram of speed proportional control
0
1000
FH
Master
FC
Master
data=
send
Master
×
Point conversion
2
-F811)+F81
F811
F813
F812
F814
(%)
command
Master
(
(Hz)
command
Slave
×
−
−
=
Slave command (Hz)
Master command (%)
(%
Master command (%)
(Note)fc=frequency reference, FH=Maximum frequency
Slave command (Hz)
Master side fc 10000
Master side FH
5000 10000
10000