F” group: main profile parameters, F” group: main profile parameters 3–8 – Hitachi SJ200 Series User Manual
Page 80
“F” Group: Main Profile Parameters
Configur
ing
Dr
iv
e P
a
ra
m
e
ters
3–8
“F” Group: Main Profile Parameters
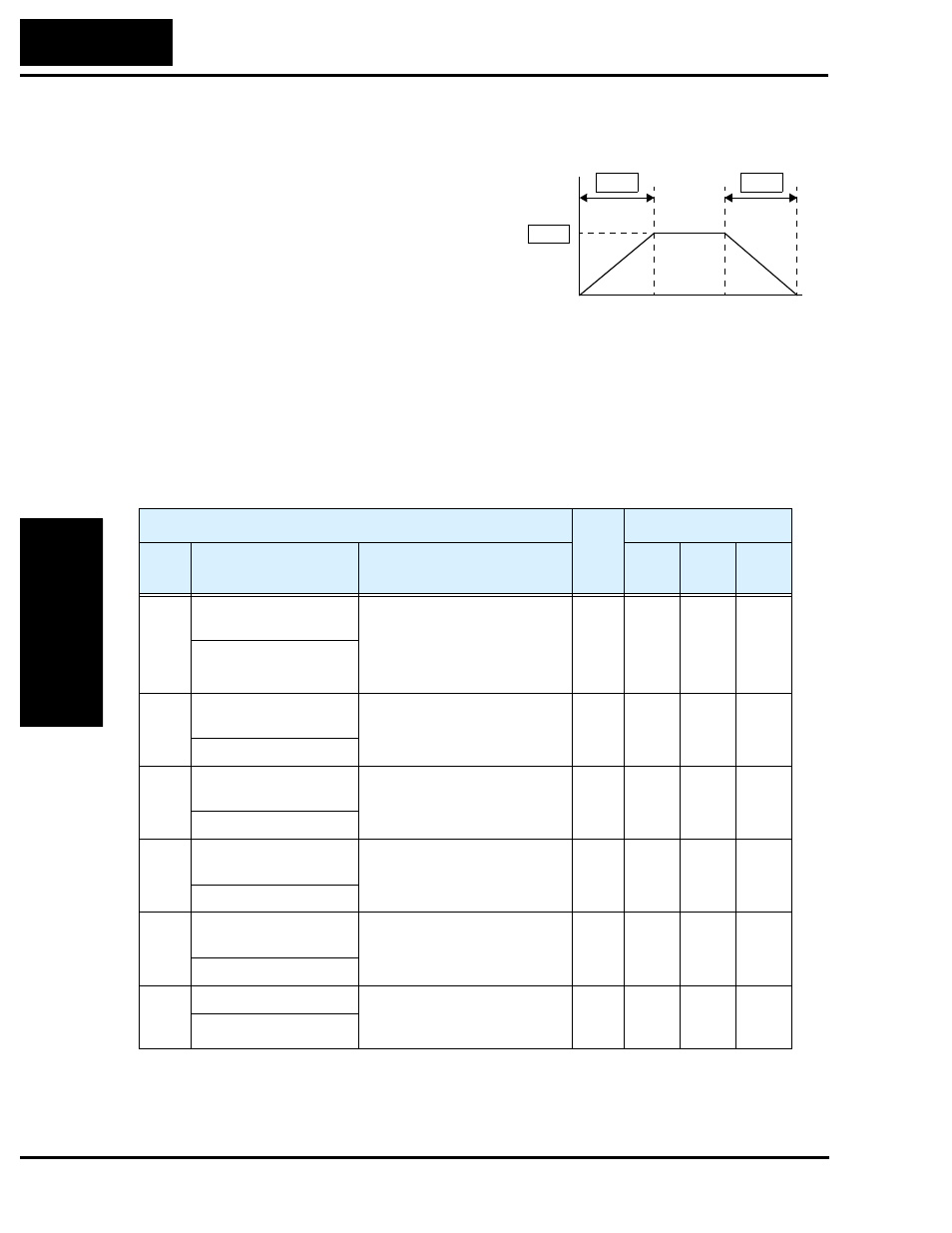
The basic frequency (speed) profile is
defined by parameters contained in the
“F” Group as shown to the right. The set
running frequency is in Hz, but accelera-
tion and deceleration are specified in the
time duration of the ramp (from zero to
maximum frequency, or from maximum
frequency to zero). The motor direction
parameter determines whether the keypad
Run key produces a FWD or REV command. This parameter does not affect the intelli-
gent terminal [FWD] and [REV] functions, which you configure separately.
Acceleration 1 and Deceleration 1 are the standard default accel and decel values for the
main profile. Accel and decel values for an alternative profile are specified by using
parameters Ax92 through Ax93. The motor direction selection (F004) determines the
direction of rotation as commanded only from the keypad. This setting applies to any
motor profile (1st or 2nd) in use at a particular time
Output
frequency
t
0
F002
F001
F003
“F” Function
Run
Mode
Edit
Defaults
Func.
Code
Name /
SRW Display
Description
–FEF
(EU)
–FU
(USA)
Units
F001
Output frequency
setting
Standard default target
frequency that determines
constant motor speed,
range is 0.0 / start frequency
to 400 Hz
✔
0.0
0.0
Hz
VR 0000.0Hz
F002
Acceleration (1) time
setting
Standard default acceleration,
range is 0.01 to 3000 sec.
✔
10.0
10.0
sec.
ACC 1 010.00s
F202
Acceleration (1) time
setting, 2nd motor
Standard default acceleration,
2nd motor,
range is 0.01 to 3000 sec.
✔
10.0
10.0
sec.
2ACC1 010.00s
F003
Deceleration (1) time
setting
Standard default deceleration,
range is 0.01 to 3000 sec.
✔
10.0
10.0
sec.
DEC 1 010.00s
F203
Deceleration (1) time
setting, 2nd motor
Standard default deceleration,
2nd motor,
range is 0.01 to 3000 sec.
✔
10.0
10.0
sec.
2DEC1 010.00s
F004
Keypad Run key routing Two options; select codes:
00... Forward
01... Reverse
✘
00
00
—
DIG-RUN FWD