Jogging command – Hitachi SJ200 Series User Manual
Page 142
SJ200 Inverter
Oper
ations
and Monitor
ing
4–15
Jogging Command
The Jog input [JG] is used to command the
motor to rotate slowly in small increments for
manual operation. The speed is limited to
10 Hz. The frequency for the jogging opera-
tion is set by parameter A038. Jogging does
not use an acceleration ramp, so we recom-
mend setting the jogging frequency A038 to
5 Hz or less to prevent tripping.
When the terminal [JG] is turned ON and the
Run command is issued, the inverter outputs
the programmed jog frequency to the motor.
To enable the Run key on the digital operator
for jog input, set the value 01(terminal mode)
in A002 (Run command source).
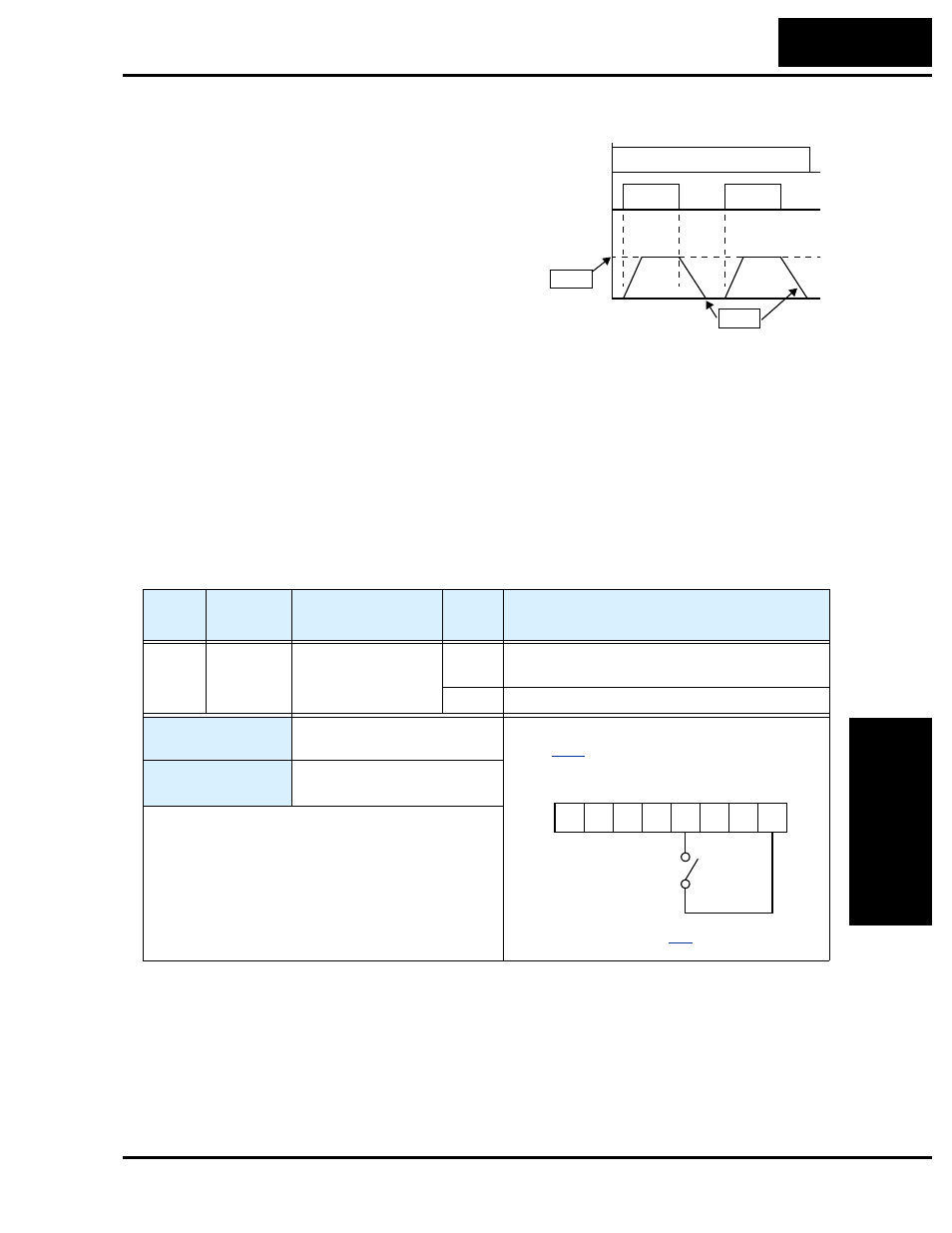
The type of deceleration used to end a motor jog operation is selectable by programming
function A039. The options are:
• 00 Free-run stop (coasting)
• 01 Deceleration (normal level) and stop
• 02 Use DC braking and stop
[JG]
[FW],
[RV]
Jog decel type
Jog
speed
1
0
1
0
t
A038
A039
Option
Code
Terminal
Symbol
Function Name
Input
State
Description
06
JG
Jogging
ON
Inverter is in Run Mode, output to motor runs at
jog parameter frequency
OFF
Inverter is in Stop Mode
Valid for inputs:
C001, C002, C003, C004,
C005, C006
Required settings:
A002= 01, A038 > B082,
A038 > 0, A039
Notes:
•
No jogging operation is performed when the set
value of jogging frequency A038 is smaller than the
start frequency B082, or the
value is 0 Hz.
•
Be sure to stop the motor when switching the
function [JG] ON or OFF.
1
2
3
4
5
6
L
PCS
Example (requires input configuration—see
page
See I/O specs on page
.
JG