Yaskawa VS606 V7 to V1000 User Manual
Page 26
Product Transition Guide
PL. V1000.01 Rev: 4/1/09
PL.V1000.01 Transition Guide 4/1/09
Page 26 of 38
Yaskawa Electric America, Inc.
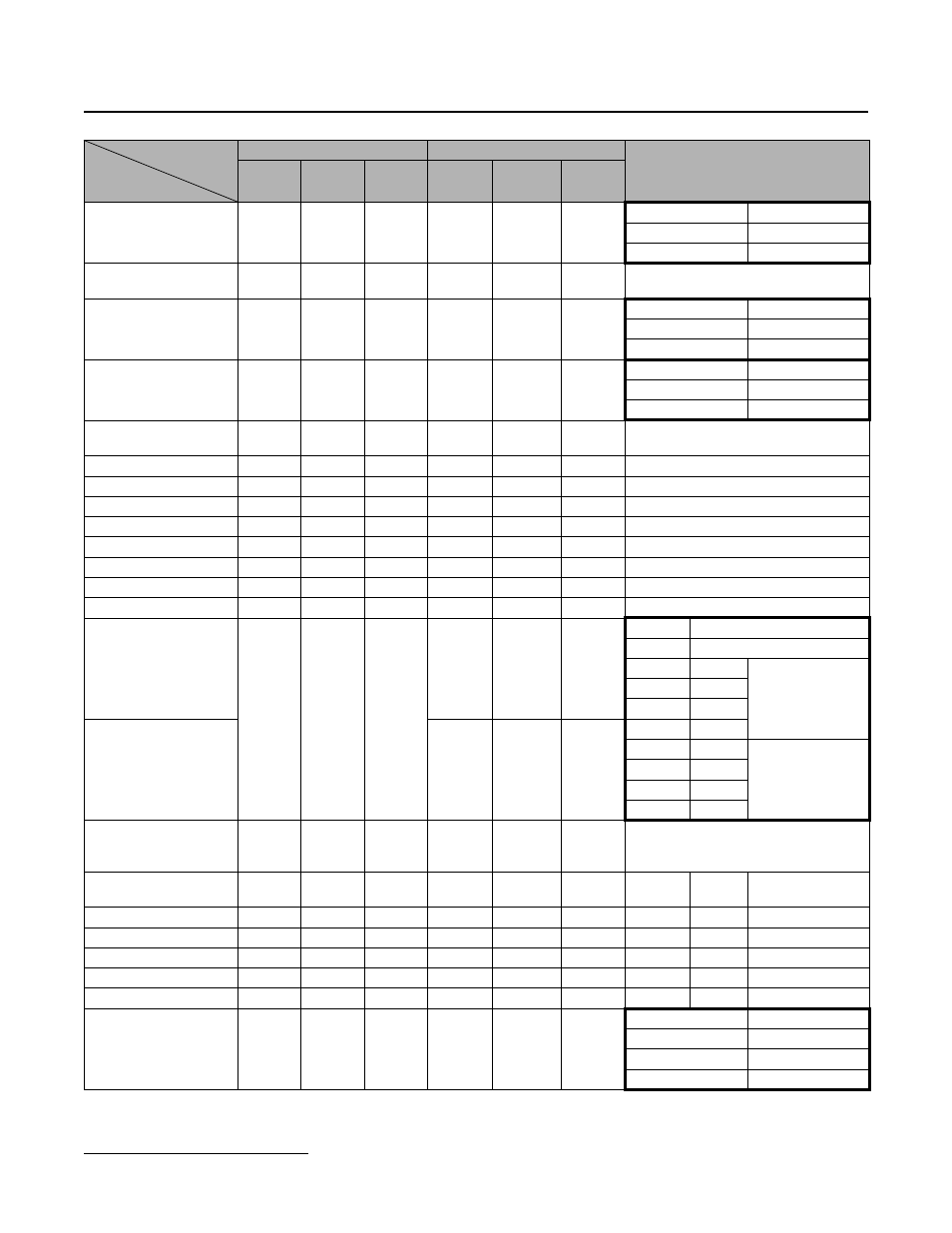
Slip compensation in
regenerative mode
selection
n113
0
C3-04
0
V7
V1000
n113
→0
C3-04
→0
n113
→1
C3-04
→1
SI-T BUS max.
transmission errors
n114
2
-
-
No ML support.
Stall prevention level
reduction during run in
constant power range
n115
0
L3-23
0
V7
V1000
n115
→0
L3-23
→0
n115
→1
L3-23
→1
Stall prevention during
run selection
n116
0
L3-05
1
V7
V1000
n116
→0
L3-05
→0
n116
→1
L3-05
→2
Under torque detection
n117 to
n119
→see n096 to n098 (Over torque det)
Multi speed reference 9
n120
0.00 Hz
d1-09
0.00 Hz
Multi speed reference 10
n121
0.00 Hz
d1-10
0.00 Hz
Multi speed reference 11
n122
0.00 Hz
d1-11
0.00 Hz
Multi speed reference 12
n123
0.00 Hz
d1-12
0.00 Hz
Multi speed reference 13
n124
0.00 Hz
d1-13
0.00 Hz
Multi speed reference 14
n125
0.00 Hz
d1-14
0.00 Hz
Multi speed reference 15
n126
0.00 Hz
d1-15
0.00 Hz
Multi speed reference 16
n127
0.00 Hz
d1-16
0.00 Hz
PID control selection
n128
0
b5-01
0
V7
V1000
n128
→0
b5-01
→0
n128
→1 b5-01→1
b5-09
→0
n128
→2 b5-01→2
n128
→3 b5-01→3
PID output mode
selection
b5-09
0
n128
→4 b5-01→4
n128
→5 b5-01→1
b5-09
→1
n128
→6 b5-01→2
n128
→7 b5-01→3
n128
→8 b5-01→4
PID feedback gain
n129
1.0
H3-03
H3-11
H6-03
100%
Use feedback signal gain and bias
(analog, pulse input gain/bias)
PID proportional gain
(P)
n130
1.0
b5-02
1.00
PID integral time (I)
n131
1.0 sec
b5-03
1.0 sec
PID derivative time (D)
n132
0.0 sec
b5-05
0.0 sec
PID output offset
n133
0.0%
b5-07
0.0%
PID integral limit
n134
100%
b5-04
100%
PID output delay time
n135
0.0 sec
b5-08
0.0 sec
PID feedback loss
detection
n136
0
b5-12
0
V7
V1000
n136
→0
b5-12
→0
n136
→1
b5-12
→1
n136
→2
b5-12
→2
Drive
Parameter
Function
V7
V1000
Note
Param.
No.
Initial
Value
Set
Value
Param.
No.
Initial
Value
Set
Value