Yaskawa VS606 V7 to V1000 User Manual
Page 25
PL.V1000.01 Transition Guide 4/1/09
Page 25 of 38
Yaskawa Electric America, Inc.
Product Transition Guide
PL. V1000.01 Rev: 4/1/09
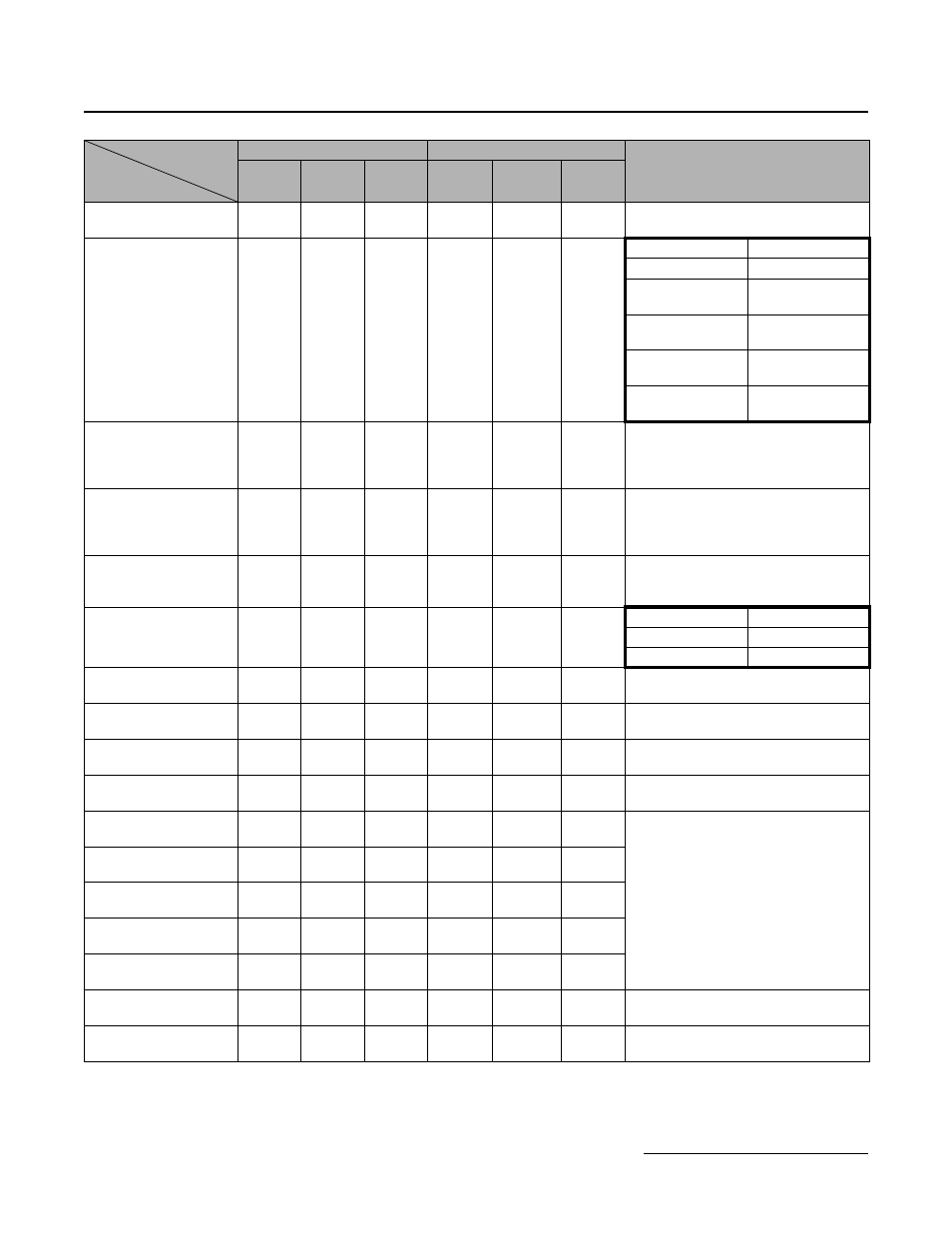
Output frequency
detection level (DO)
n095
0.00 Hz
L4-01
0.0 Hz
Over / under torque
detection
n096
(OL)
n117
(UL)
0
L6-01
L6-03
0
V7
V1000
n096,117
→0
L6-01/03
→0
n096,117
→1
L6-01/03
→
1(OL),5(UL)
n096,117
→2
L6-01/03
→
3(OL),6(UL)
n096,117
→3
L6-01/03
→
2(OL),7(UL)
n096,117
→4
L6-01/03
→
4(OL),8(UL)
Over / under torque
detection level
n098
(OL)
n118
(UL)
160%
10%
L6-02
L6-05
150%
Over / under torque
detection time
n099
(OL)
n119
(UL)
0.1 sec
L6-03
L6-06
0.1 sec
Torque selection in
vector mode
n097
0
-
-
The torque reference value (U1-09) is
always used as comparison value for
torque detection in vector control.
Frequency reference
hold selection (up/down
function)
1n00
0
d4-01
0
V7
V1000
n100
→0
d4-01
→0
n100
→1
d4-01
→1
Speed search
deceleration time
n101
2.0 sec
b3-03
2.0 sec
Speed search
deactivation current
n102
150%
b3-02
A1-02
dep.
Torque compensation
gain
n103
1.0
C4-01
1.00
Torque compensation
time constant
n104
0.3 sec
C4-02
A1-02
dep.
Torque compensation
iron losses
n105
E2-10
o2-04
dep.
Value is different to V7 and capacity
dependent
Motor rated slip
n106
E2-02
o2-04
dep.
Motor line-to-line
resistance
n107
E2-05
o2-04
dep.
Motor leakage
inductance
n108
E2-06
o2-04
dep.
Motor no-load current
n110
E2-03
o2-04
dep.
Slip compensation gain
n111
0.0
C3-01
A1-02
dep.
Slip compensation time
constant
n112
2.0 sec
C3-02
A1-02
dep.
Drive
Parameter
Function
V7
V1000
Note
Param.
No.
Initial
Value
Set
Value
Param.
No.
Initial
Value
Set
Value