Direction, If volume = 0, speed = 0 – Wavetronix SmartSensor HD (101-0415) - User Guide User Manual
Page 71
70
CHAPTER 7 • DATA
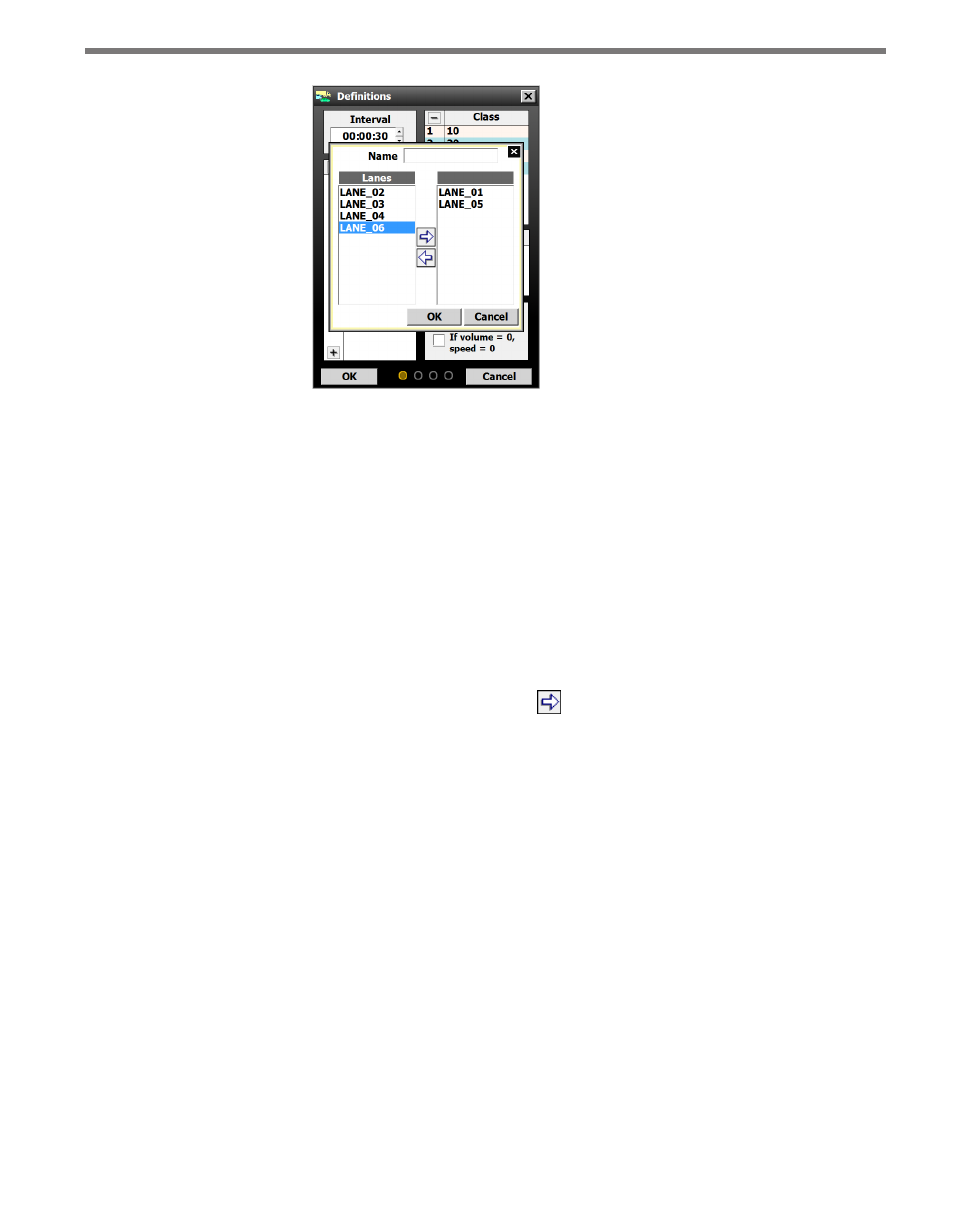
Figure 7.4 – Approaches
Approaches are used in interval data and will contain the same type of information that
each lane would. An advantage to using approaches rather than post-processing individual
lane data is that approaches gather aggregate data. An example of when this would be useful
is in determining speed limits. Using approaches, the sensor could find the 85th percentile
speed for all cars in all lanes going one direction, rather than finding it for each lane.
When lanes of differing directions are used, the absolute value of the speed is used to calcu-
late all speed fields. Also, the Right and Wrong direction bins will contain the total number
of vehicles traveling with the user-defined direction of the corresponding lanes in the Right
bin, and all others in the Wrong bin (see the Direction section below).
To create an approach, select the desired lanes and click the button. Each approach can
be named to coincide with the purpose of the approach.
Direction
The direction bins are configured as Right and Wrong. This refers to whether vehicles in a
given lane are traveling in the direction the lane is configured (to change lane direction, use
the lane window in the Configuration screen). This is most useful in the case of reversible
lanes, where traffic goes different directions in a lane depending on the time of day. In this
case, for part of the day the vehicles would be counted in the Right bin; during the other
part of the day, the vehicles would be counted in the Wrong bin.
To enable direction bins, check the Direction checkbox.
If volume = 0, speed = 0
If during an interval, the volume is zero (meaning no cars were detected), SSMHD will re-
port the average speed of the last interval. If you would like the intervals that are reporting
zero volume to report speeds as zero, simply check the If volume = 0, speed = 0 checkbox.