Sundance PARS User Manual
Page 37
Revision 11-wip-7
Page 37 of 70
Sundance Digital Signal Processing, Inc.
4790 Caughlin Parkway 233, Reno, NV 89519-0907, U.S.A.
email:
Tel: +1 (775) 827-3103
www.sundancedsp.com
3.2.2.
Hardware Implementation
The hardware implementation parameters are straightforward. The embedded systems
that PARS can currently target are based on DSP from Texas Instruments.
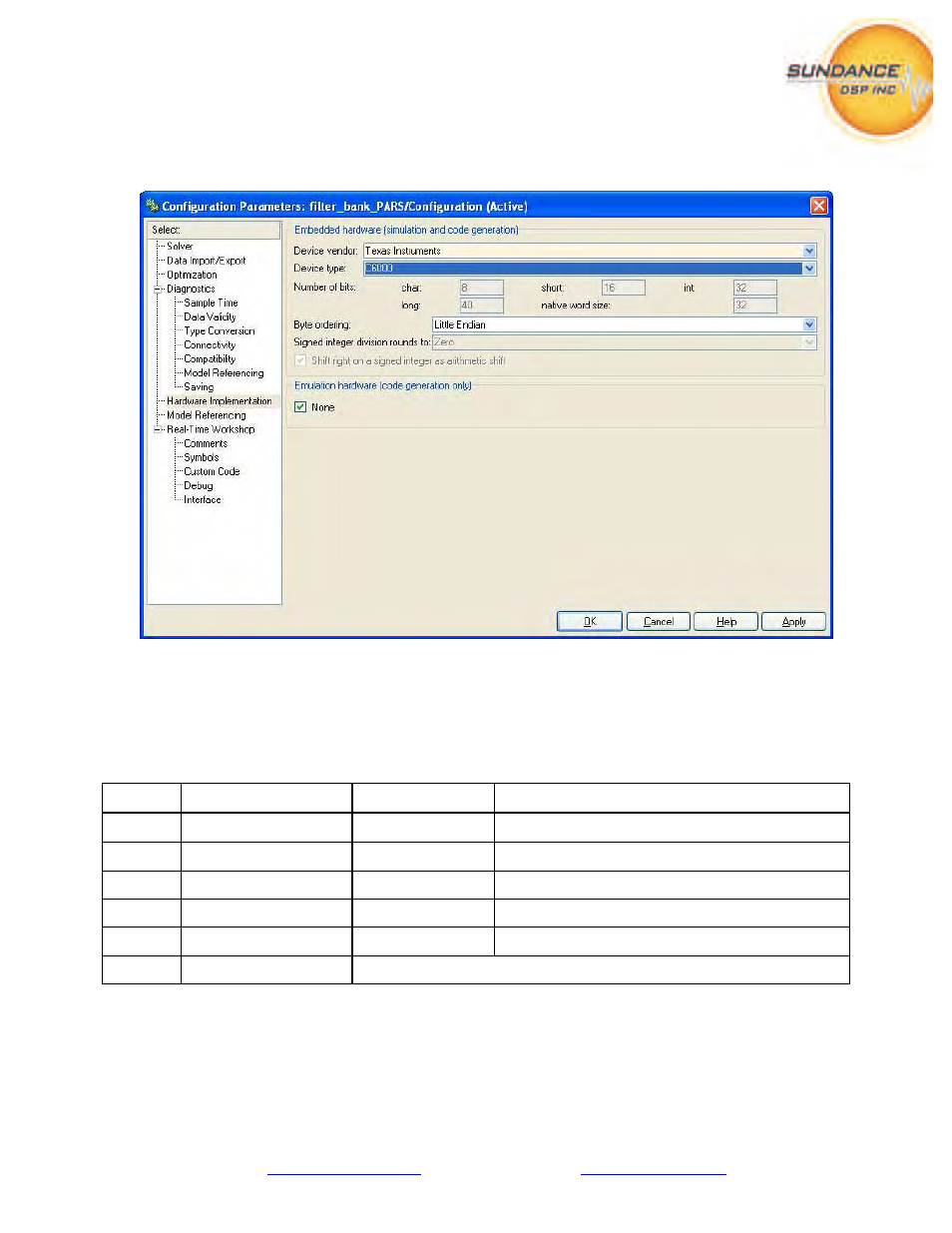
Figure 40 - Simulink model Hardware Implementation parameters
Select ‘Texas Instruments’ and ‘C6000’ for device vendor and type. Select byte ordering according to
your vendor hardware instructions. Note that you can leave ‘Emulation Hardware’ set to ‘None”.
3.2.3.
Summary
Group
Parameter
Value
Notes
Solver
‘SolverType’
‘Fixed-step’
Solver
‘Solver’
‘FixedStepDiscrete’
Solver
‘StopTime’
‘Inf’
Recommended prior to generation
Solver
‘SampleTimeConstraint’
‘STIndependent’
Optional
Solver
‘SolverMode’
‘SingleTasking’
Ignored if ‘SampleTimeConstraint’ =‘STIndependent’
Hardware ‘TargetHWDeviceType’
‘Texas Instruments->C6000’
Table 2 - Model Parameters for Code Generation
Table 2, above, summarizes the options used by PARS when generating code. They are recommended
values to configure your PARS model so that simulation can best approximate the embedded
environment.