Remote control & monitoring, 1 remote-mode "dbcan, 2 remote-mode "rib – d&b D12 Software User Manual
Page 35
4. Remote control & monitoring
1......8
1......8
Pin 1 n.c.
Pin 2 n.c.
Pin 3 n.c.
Pin 4 CAN_H
Pin 5 CAN_L
Pin 6 n.c.
Pin 7 RIB Data +
Pin 8 RIB Data -
Shield CAN Ground
1
8
. . . . . .
Fig. 11: Pin assignment for remote control
(RJ45)
The D12 is fitted with a two-wire serial remote control interface, (2 x
RJ 45) carrying both the RIB and CAN-Bus signals. All pins of both
connectors are wired in parallel allowing either to be used as the input
or output. Where remote control networking conforms to a "Bus or Ring
topology" one connector is used for the incoming signal and the second
connector allows for direct connection to another device or for
terminating in case of a CAN-Bus network. The interface connections
for the RIB (pin 7/8) are opto-coupled, while the connections for the
CAN-Bus (pin 4/5) are hard wired to common ground (protective
earth).
4.1
Remote-Mode "dbCAN"
All functions of the D12 can be remotely interrogated via the dbCAN
(CAN-Bus).
Note:
A detailed description of remote control via dbCAN (CAN-Bus) is given
in the technical information TI 312 which can be downloaded form the
d&b website at
4.2
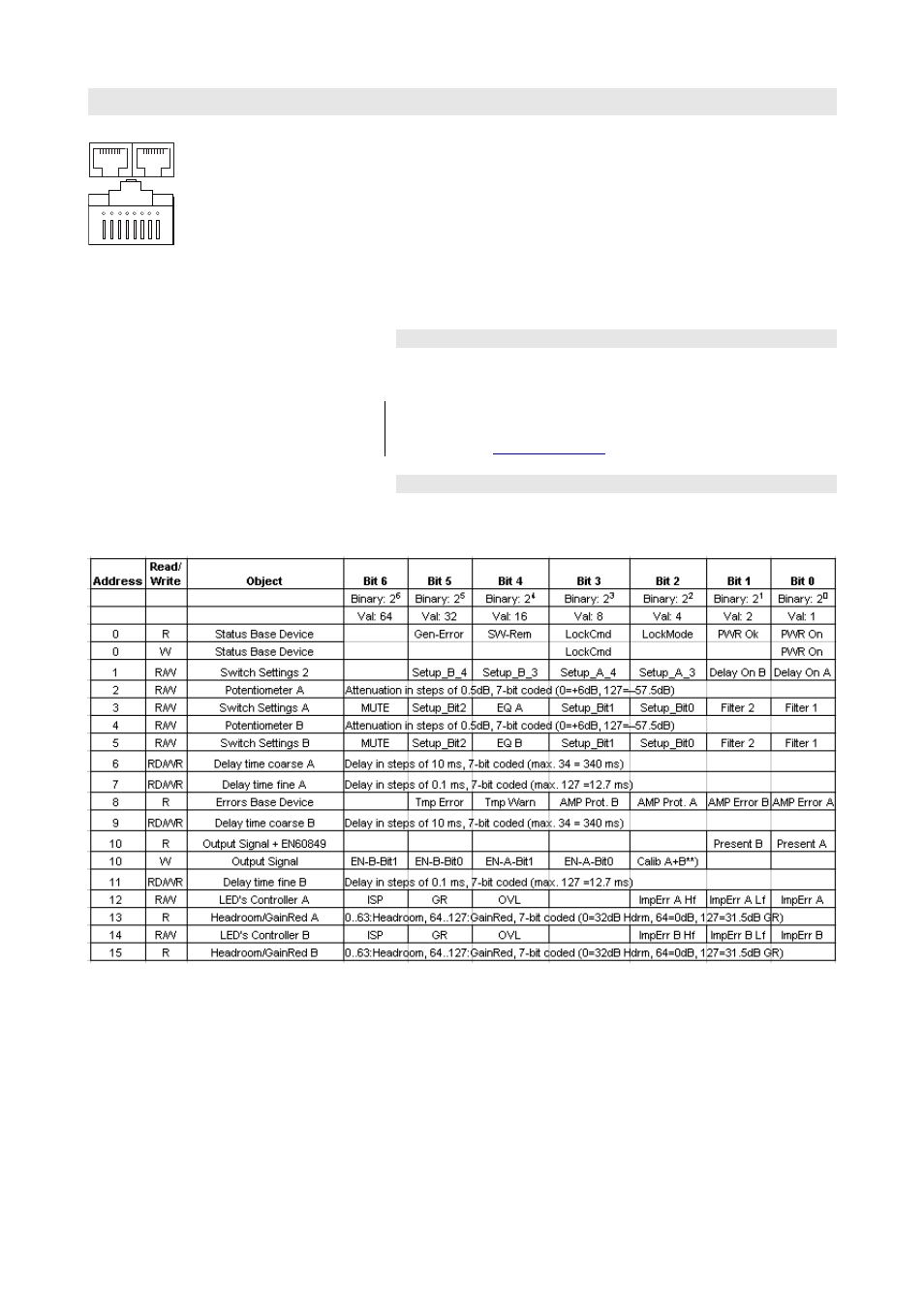
Remote-Mode "RIB"
The D12 can be remotely interrogated via the d&b Remote Interface
Bridge (RIB). Please refer to the RIB Object address table below.
Tab. 5: D12 RIB Object address table
D12 Software manual (Firmware V2.x.x)
(5.5 EN)
Page 35 of 36