Endat, biss, hiperface dsl encoder interface, Resolver sine and cosine encoder interface – Altera Multiaxis Motor Control Board User Manual
Page 12
Page 12
Functional Description
Multiaxis Motor Control Board
February 2014
Altera Corporation
EnDat, BiSS, HIPERFACE DSL Encoder Interface
The Multiaxis Motor Control Board supports connection of encoders with RS485
interfaces. You may configure each motor channel independently for any of the
encoder interface types.
Each encoder interface type requires you to implement the appropriate interface IP
cores in the FPGA on the host board. Altera partners provide appropriate IP cores
with the reference design.
The Multiaxis Motor Control Board includes different electrical termination schemes
for the encoder interfaces.
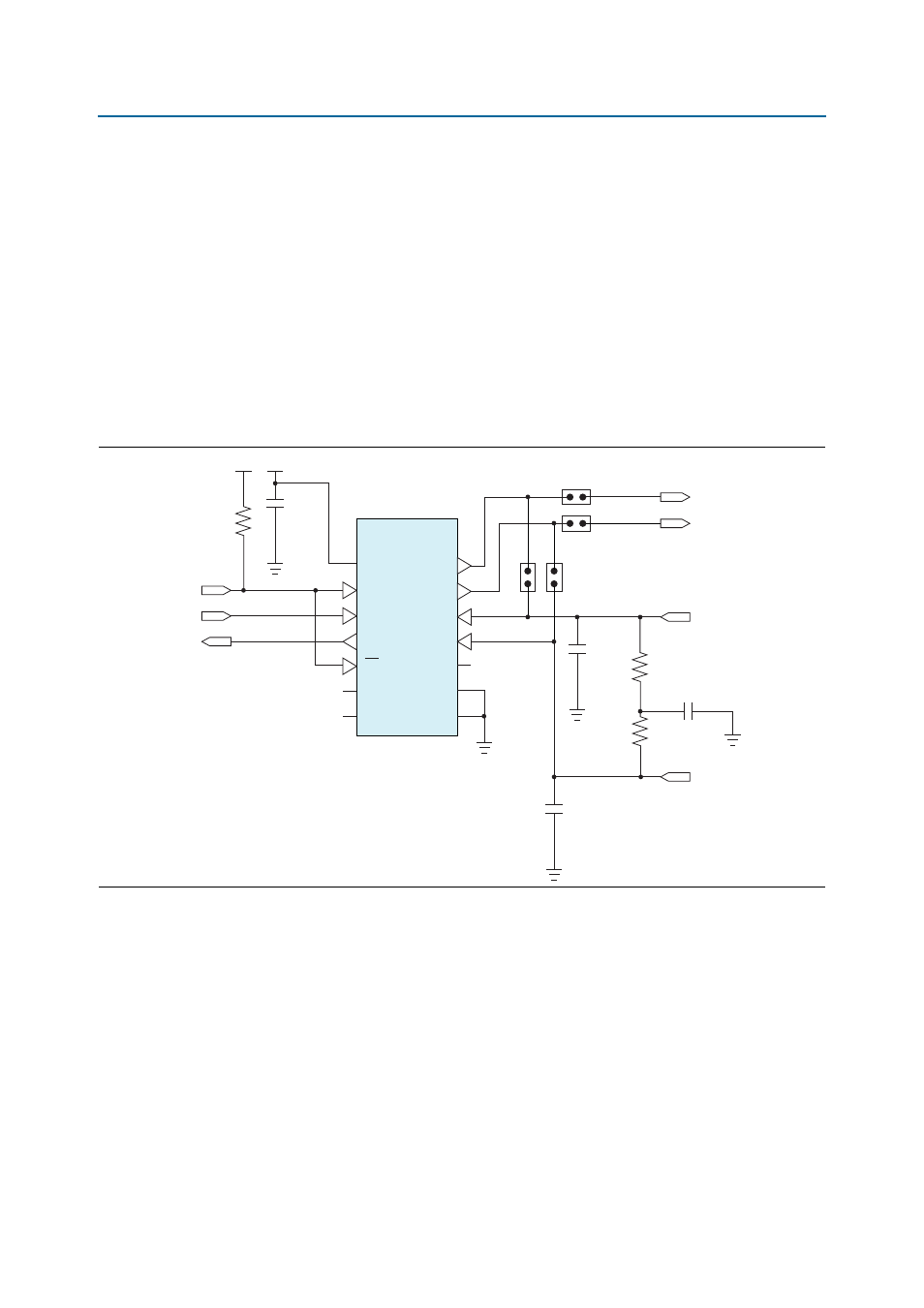
shows an example a channel (channel 0) interface
termination. Capacitors C107 and C111 are not fitted, Resistors R103, R106 and
capacitor C109 are fitted. The jumpers allow for independent pairs for TX and RX or
one common pair. Refer to
Table 11
for other channel jumper settings.
Resolver Sine and Cosine Encoder Interface
The FPGA on the host board implements IP cores to drive the single-ended resolver
stimulus signal with a sigma-delta encoded 8-kHz sine wave. The Multiaxis Motor
Control Board converts and filters this signal to a differential drive for the resolver.
ADS1205 dual channel 10-MHz sigma-delta ADCs, with a ±2.5-V input range, clocked
at 20 MHz, digitize resolver encoder sine and cosine feedback signals. The ADS1205
divides the applied clock internally to generate the 10-Mbps data rate. The Multiaxis
Motor Control Board passes the resulting bitstreams through isolators for isolation.
Figure 8. Encoder Interface Termination
VDD
DE
D
R
RE
NC1
NC2
Y
Z
A
B
NC3
GND1
GND2
+5 V
J5
J6
J7
J8
DRV_0_RS485_EN
DRV_0_RS485_TX
DRV_0_RS485_RX
+5 V
DRV_0_SER_DATA_TX_P
DRV_0_SER_DATA_TX_N
DRV_0_SER_DATA_RX_P
DRV_0_SER_DATA_RX_N
LTC1687CS
DNP
330 pF
200 V
DNP
330 pF
200 V
56 R
56 R
4K7
16 V
0.1
µF
16 V
2.2
µF