Figure 4-10: automatic velocity decrease – ADLINK HSL-4XMO User Manual
Page 53
Operation Theory
43
velocity from (StrVel + VSacc) to (MaxVel - VSacc) constantly. The
deceleration period is similar in fashion.
Note:
If user wants to disable the linear region, the VSacc/VSdec
must be assigned “0” rather than “0.5” (MaxVel-StrVel).
Remember that the VSacc/VSdec is in units of PPS and it should
always keep in the range of [0 to (MaxVel - Strvel)/2 ], where “0”
means no linear region.
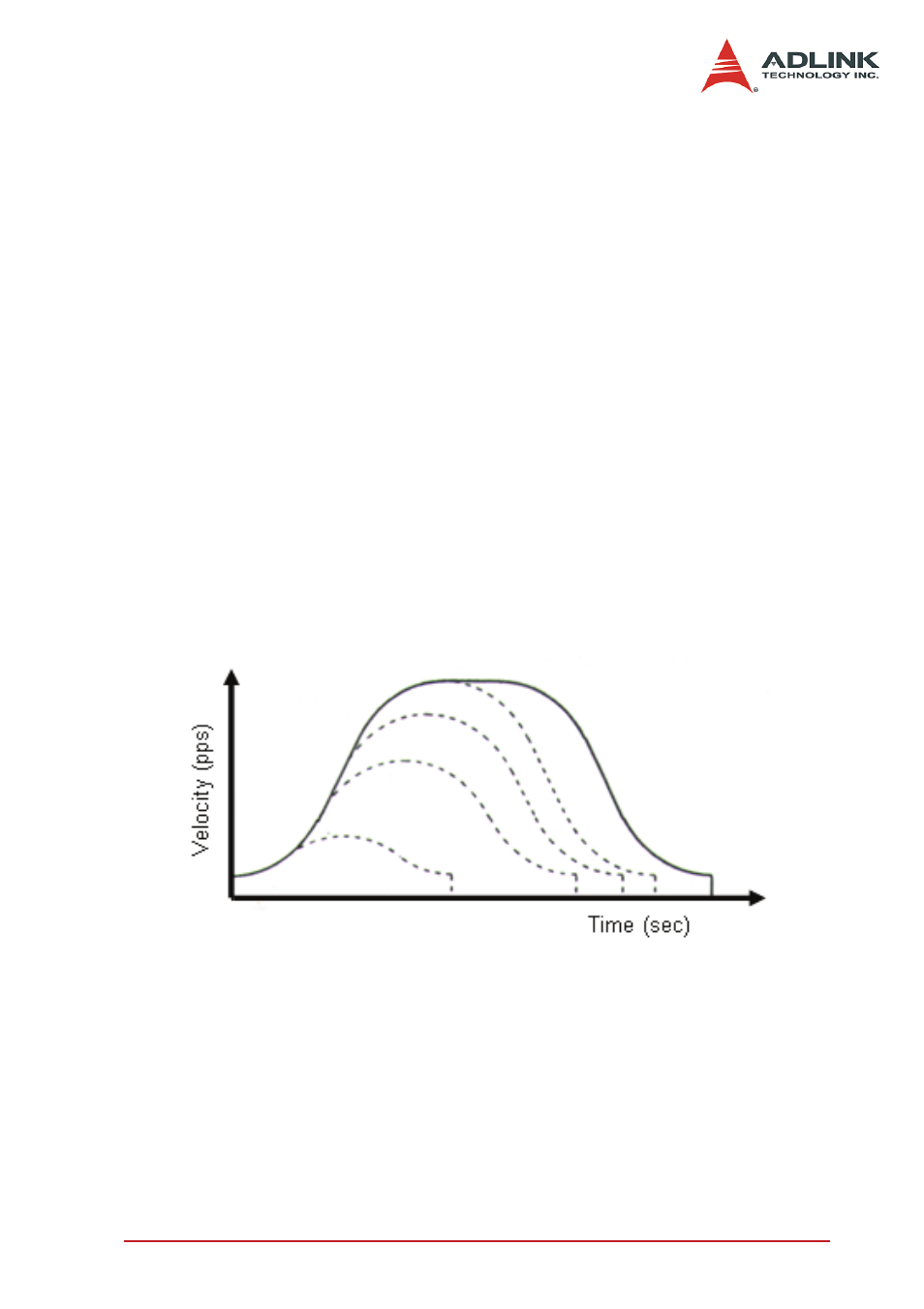
The S-curve profile motion functions are designed to always pro-
duce smooth motion. If the time for acceleration parameters com-
bined with the final position don’t allow an axis to reach the
maximum velocity (i.e. the moving distance is too small to reach
MaxVel), then the maximum velocity is automatically lowered (see
the following figure).
The rule is to lower the value of MaxVel and the Tacc, Tdec,
VSacc, VSdec automatically, and keep StrVel, acceleration, and
jerk unchanged. This is also applicable to Trapezoidal profile
motion.
Figure 4-10: Automatic Velocity Decrease
X
Relative Functions:
HSL_M_start_sr_move()
HSL_M_start_sa_move()
HSL_M_motion_done()
HSL_M_set_feedback_src()
HSL_M_set_move_ratio()