S-curve profile motion, Figure 4-8: encoder diagram – ADLINK HSL-4XMO User Manual
Page 51
Operation Theory
41
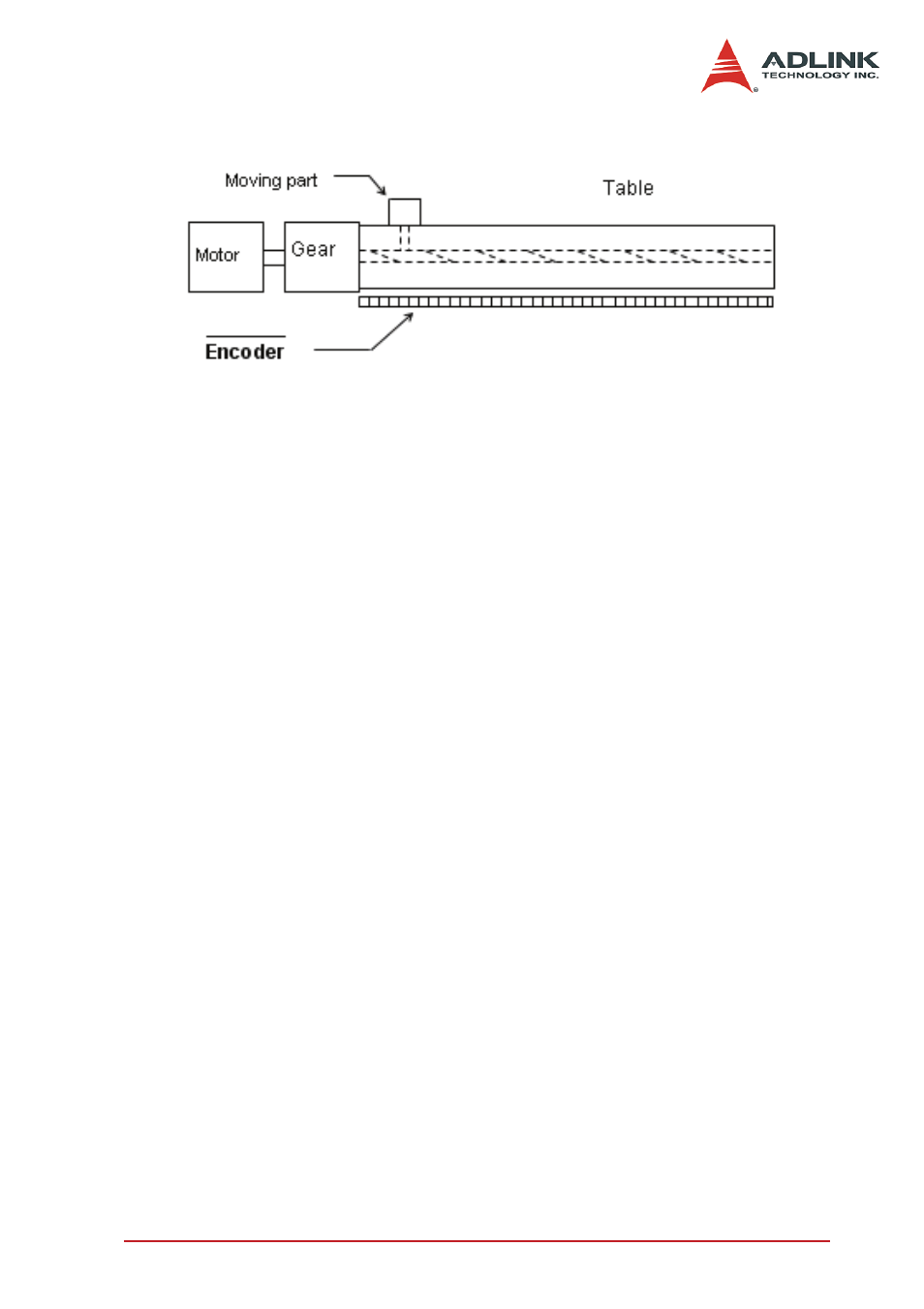
Figure 4-8: Encoder Diagram
If this ratio is not set before issuing the start moving command, it
will cause problems when running in “Absolute Mode” because the
HSL-4XMO won’t recognize the actual absolute position during
motion.
X
Relative Functions:
HSL_M_start_ta_move()
HSL_M_start_tr_move()
HSL_M_motion_done()
HSL_M_set_feedback_src()
HSL_M_set_move_ratio()
S-curve Profile Motion
This mode is used to move a single-axis motor to a specified posi-
tion (or distance) with a S-curve velocity profile. S-curve accelera-
tion profiles are useful for both stepper and servomotors. The
smooth transitions between the start of the acceleration ramp and
transition to constant velocity produce less wear and tear than a
trapezoidal profile motion. The smoother performance increases
the life of the motor and the mechanics of the system.
- USB-1901 (84 pages)
- USB-1210 (54 pages)
- USB-2401 (60 pages)
- USB-7230 (50 pages)
- USB-2405 (56 pages)
- DAQe-2010 (92 pages)
- DAQe-2204 (100 pages)
- DAQe-2213 (94 pages)
- DAQe-2501 (74 pages)
- PXI-2010 (84 pages)
- PXI-2020 (60 pages)
- PXI-2501 (62 pages)
- cPCI-9116 (98 pages)
- ACL-8112 Series (93 pages)
- ACL-8112 Series (94 pages)
- ACL-8112 Series (92 pages)
- ACL-8216 (75 pages)
- ACL-8111 (61 pages)
- PCM-9112+ (10 pages)
- PCM-9112+ (94 pages)
- cPCI-6216V (47 pages)
- ACL-6126 (28 pages)
- ACL-6128A (40 pages)
- PCM-6308V+ (52 pages)
- PCM-6308V+ (4 pages)
- PCI-7444 (82 pages)
- PCI-7434 (48 pages)
- PCI-7234 (56 pages)
- PCI-7260 (66 pages)
- PCI-7258 (38 pages)
- PCI-7256 (48 pages)
- PCI-7250 (48 pages)
- LPCI-7250 (48 pages)
- PCI-7396 (65 pages)
- PCI-7296 (59 pages)
- PCI-8554 (67 pages)
- PCIe-7360 (94 pages)
- PCIe-7350 (86 pages)
- PCIe-7300A (114 pages)
- PCIe-7200 (51 pages)
- PCI-7300A (112 pages)
- PCI-7300A (83 pages)
- PCI-7200 (96 pages)
- cPCI-7300 (82 pages)
- cPCI-7300 (83 pages)