Futaba 8FG 2.4GHz User Manual
Page 39
39
0RGHO%DVLF6HWWLQJ3URFHGXUH!
IRUHDFKFRQGLWLRQ$WLQLWLDOVHWWLQJWKLVIXQFWLRQ
LVLQWKH,1+VWDWH7RXVHLWVHWLWWRWKH21
VWDWH
6HWWLQJH[DPSOH!
$FWLYDWHWKHPL[LQJFXUYHRIHDFKFRQGLWLRQZLWK
WKHFRQGLWLRQVHOHFWVZLWFK
A curve setting example is shown below.
ŏ3LWFK WR 58' PL[LQJ FXUYH 1RUPDO
Use the hovering system and set this curve to
match take off and landing and vertical climb at a
constant speed.
ŏ3LWFK WR 58' PL[LQJ ,GOH XS
Use this curve in 540º stall turn, loop, and rolling stall
turn, and adjust it so the fuselage is facing straight
ahead when heading into the wind.
ŏ3LWFK WR 58' PL[LQJ +ROG
This function is set so that the fuselage is facing
straight ahead at straight line auto rotation. The
pitch of the tail rotor becomes nearly 0º.
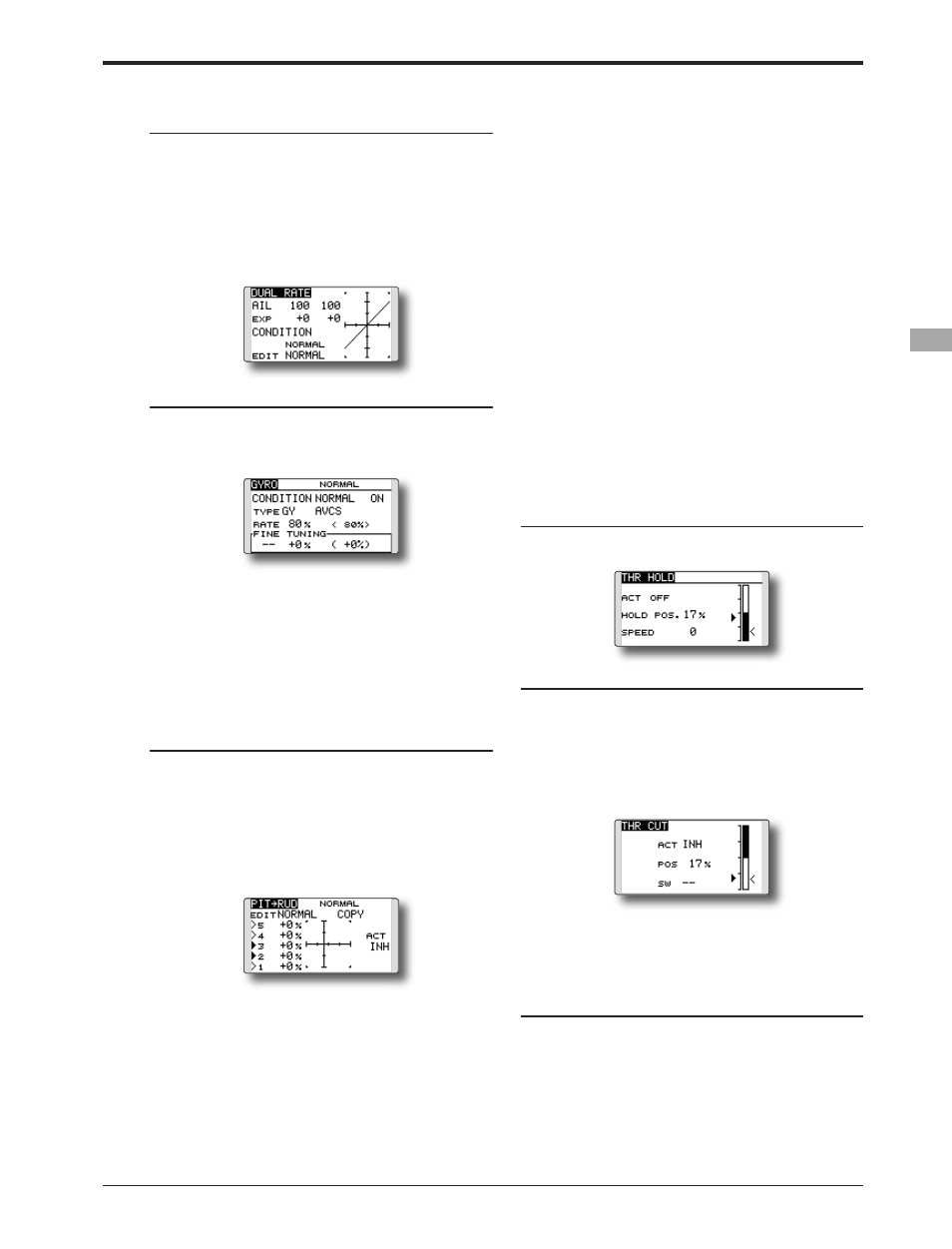
7KURWWOHKROGVHWWLQJ
,IWKURWWOHKROGLVQHFHVVDU\SOHDVHUHIHUWRWKH7+5+2/'
IXQFWLRQS
7KURWWOHFXWVHWWLQJ
7KURWWOH FXW SURYLGHV DQ HDV\ ZD\ WR VWRS WKH
HQJLQHE\ÀLSSLQJDVZLWFKZLWKWKHWKURWWOHVWLFN
at idle. The action is not functional at high throttle
WR DYRLG DFFLGHQWDO GHDG VWLFNV 7KH VZLWFK¶V
ORFDWLRQDQGGLUHFWLRQPXVWEHFKRVHQDVLWGHIDXOWV
WR18//
:LWKWKURWWOHVWLFNDWLGOHDGMXVWWKHFXWSRVLWLRQXQWLOWKH
HQJLQH FRQVLVWHQWO\ VKXWV RII EXW WKURWWOH OLQNDJH LV QRW
binding.
6ZDVK0L[FRUUHFWVDLOHURQHOHYDWRUDQG
SLWFKLQWHUDFWLRQ
7KHVZDVKPL[IXQFWLRQLVXVHGWRFRUUHFWWKH
VZDVK SODWH LQ WKH DLOHURQ /HIW5LJKW &\FOLF
DQG HOHYDWRU )RUZDUG$IW &\FOLF GLUHFWLRQ
corresponding to each operation of each condition.
6. D/R function
'5 IXQFWLRQ LV XVHG WR DGMXVW WKH WKURZ DQG
RSHUDWLRQFXUYHRIDLOHURQHOHYDWRUDQGUXGGHUIRU
each condition.
)RU WKURWWOH DQG SLWFK FXUYH VHWWLQJV UHIHU WR WKH DIRUH
mentioned "Throttle/Pitch curve setting"
7KLVLVQRUPDOO\XVHGDIWHU(QG3RLQWKDVGH¿QHG
WKHPD[LPXPWKURZGLUHFWLRQV
*\URVHQVLWLYLW\DQGPRGHVZLWFKLQJ
7KH J\UR VHQVLWLYLW\ DQG PRGH VZLWFKLQJ
IXQFWLRQLVXWLOL]HGWRDGMXVWWKHJ\URPL[LQJRIWKH
PRGHODQGFDQEHVHWIRUHDFKFRQGLWLRQ
ŏ 1RUPDO FRQGLWLRQ KRYHULQJ *\UR VHQVLWLYLW\
maximum
ŏ ,GOH XS ,GOH XS 7KURWWOH KROG *\UR
sensitivity minimum
ŏ +RZHYHU GXULQJ DXWR URWDWLRQV ZLWK D WDLO
driven helicopter, this function may not have
any effect on the high gyro sensitivity.
3LWFKWR58'PL[LQJVHWWLQJ
Note: When using a GY601, GY502, GY520,
GY401, or other heading hold gyro, this
Pitch to RUD mixing should not be used. The
reaction torque is corrected by the gyro.
When operating the gyro in the AVCS mode,
the mixed signal will cause neutral deviation
symptoms and the gyro will not operate
normally.
8VH WKLV IXQFWLRQ ZKHQ \RX ZDQW WR VXSSUHVV
WKHWRUTXHJHQHUDWHGE\WKHFKDQJHVLQWKHSLWFK
and speed of the main rotor during pitch operation.
$GMXVW LW VR WKDW WKH QRVH GRHV QRW VZLQJ LQ WKH
UXGGHUGLUHFWLRQ+RZHYHUZKHQXVLQJDKHDGLQJ
KROGJ\UROLNHWKRVHVKRZQDERYHGRQRWXVH3LWFK
to rudder mixing.
$FWLYDWHWKH3LWFKWRUXGGHU3LW!58'PL[LQJ
IXQFWLRQIURPWKH0RGHO0HQXDQGVHWWKHFXUYH