Digilent MX4cK User Manual
Page 17
Cerebot MX4cK Reference Manual
www.digilentinc.com
page 17 of 35
Copyright Digilent, Inc. All rights reserved. Other product and company names mentioned may be trademarks of their respective owners.
The standard SPI library supports access to a
single SPI port, SPI2. This is accessed using
the SPI object.
The DSPI library supports access to both SPI
ports. The DSPI0 object class is used to create
an object used to access the default SPI port,
SPI2, connector JB. The DSPI1 object class is
used to access SPI1, connector J1.
I
2
C™ Interface
The Inter-Integrated Circuit (I
2
C
TM
) Interface
provides a medium speed (100K or 400K bps)
synchronous serial communications bus. The
I
2
C interface provides master and slave
operation using either 7 bit or 10 bit device
addressing. Each device is given a unique
address, and the protocol provides the ability
to address packets to a specific device or to
broadcast packets to all devices on the bus.
Refer to the Microchip PIC32MX3XX/4XX
Family Data Sheet and the PIC32 Family
Reference Manual, Section 24, Inter-Integrated
Circuit, for detailed information on configuring
and using the I
2
C interface.
The PIC32MX460 microcontroller provides for
two independent I
2
C interfaces. The Cerebot
MX4cK is designed to provide dedicated
access to one of these interfaces, I2C2, using
I
2
C daisy chain connector J6. The other I
2
C
interface, I2C1, is accessed using I
2
C daisy
chain connector J2. The signals for I2C1 are
shared with Pmod connector JF, and also
appear on pins 1 & 2 of JF.
The I
2
C daisy chain connectors provide two
positions for connecting to the I
2
C signals, SDA
and SCL, as well as power and ground. By
using two-wire or four-wire MTE cables
(available separately from Digilent) a daisy
chain of multiple Cerebot MX4cK boards or
other I
2
C-capable boards or devices can be
created.
The I
2
C bus is an open-collector bus. Devices
on the bus actively drive the signals low. The
high state of the I
2
C signals is achieved by pull-
up resistors when no device is driving the lines
low. One device on the I
2
C bus must provide
the pull-up resistors. On the Cerebot MX4cK,
I2C2 has fixed 2.2K ohm pull-up resistors.
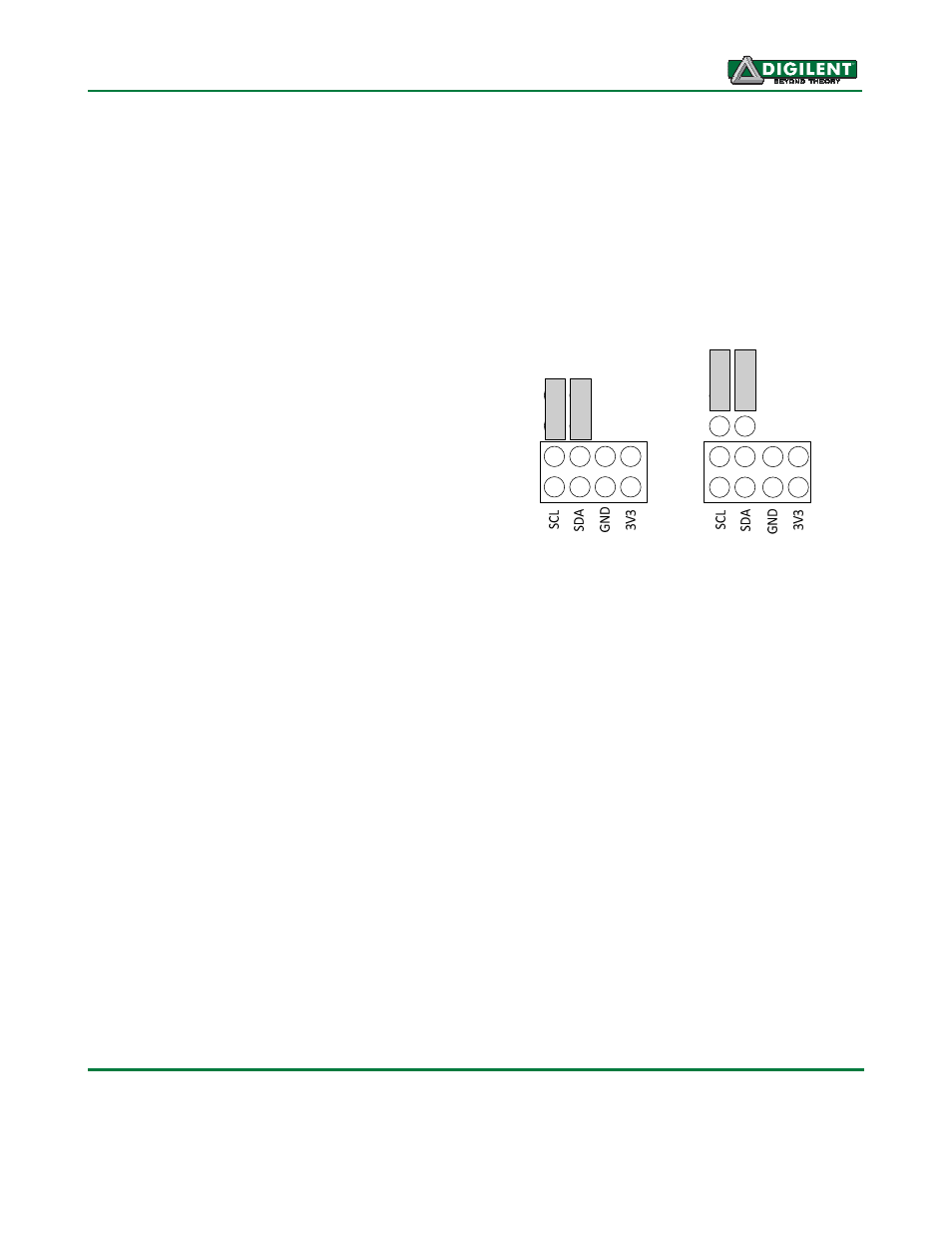
I2C1 has selectable pull-up resistors that can
be enabled or disabled via jumpers J3 and J4,.
The pull-ups are enabled by installing shorting
blocks and are disabled by removing the
shorting blocks. Generally, only one device on
the bus will have the pull-ups enabled.
Pull-ups
Enabled
Pull-ups
Disabled
Jumper Settings for I
2
C Pull-Up Resistors
When using the Cerebot MX4cK with the
MPIDE and the chipKIT system, the I
2
C
interfaces are accessed using the standard
chipKIT Wire library, or the Digilent DTWI
library.
The Wire library supports a single I
2
C interface,
I2C1 on J2. This is accessed using the Wire
object.
The DTWI library supports both I
2
C interfaces.
The DTWI0 object class is used to create an
object for access to I2C1 and the DTWI1 object
class is used to access I2C2.
The pinouts of the I
2
C daisy chain connectors
are as follows:
Connector J2. I2C1
• J2-1 – SCL1
• J2-2 – SCL1