D.) stepper motors demystified -29, Motion control - advanced, Stepper motors demystified – Kessler MOTION CONTROL: Oracle Controller Full (3.02 SL) User Manual
Page 28
STEPPER MOTORS DEMYSTIFIED
MOTION CONTROL -
ADVANCED
Understanding how a stepper motor works can aid greatly when
doing advanced configurations with the ORACLE. This section will
briefly cover the basics of a stepper motor and how it interacts with
an ORACLE.
The stepper motors, used in the Kessler Crane systems, have only 4
variables with which we are concerned. ON, OFF, CYCLES, and POWER.
ON and OFF are just that. The motor is either on or it is off. The
POWER determines how much the motor moves when it is in the
on mode. CYCLES is how many times the on/off sequence occurs.
So let’s go through a basic setup to explain further. If we set the
motor ON time to be 0.5 seconds and the motor OFF time to also be 0.5
seconds, a complete CYCLE of on/ off would take 1 second. If we ran this
on/off cycle 30 times, the entire move would take 30 seconds. The only
variable we are missing in this equation is POWER.
POWER determines how far the motor will move when it is on. The
lower the power, the less distance it will travel. The greater the
power, the greater the distance. We liken this to the difference between
walking and running.
In our sample, we know the motor turns ON and will move for 0.5
seconds in each CYCLE. By adjusting the POWER, we can determine
how far it moves in that half second. If you want a slow, short move, you
would use a low power. For a faster, long move, a high power would ac-
complish this.
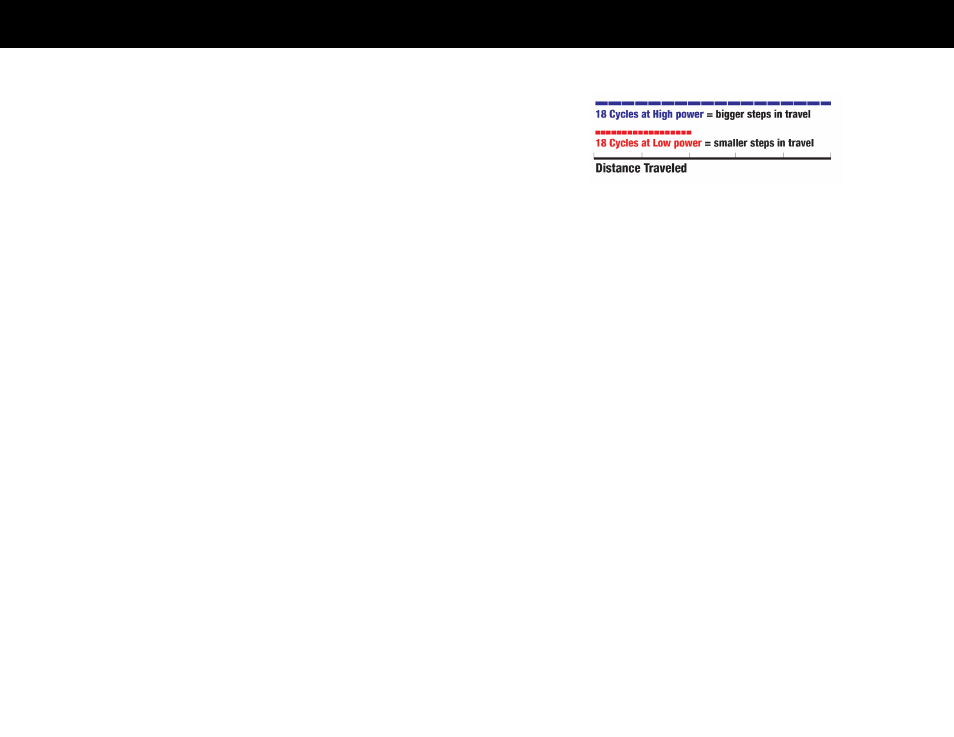
The following charts show a generic example of the difference between
a high POWER setting and a low POWER setting while keeping the ON,
OFF, and CYCLES variables constant.
The above sample is very basic but it gives you an idea of what you can
do by adjusting only one variable. In Advanced mode on the ORACLE,
you can individually adjust each variable (ON, OFF, CYCLES, POWER) to
create custom moves.
For example, lets say you have a Kessler Shuttle Pod setup on a 30 foot
track and you want to program the ORACLE so the motor comes on
every 10 minutes and moves the Pod 1 foot. In this example, we know
that our motor OFF time should be 10 minutes so there is a 10 minute
gap between each time the motor turns on and moves the Pod. If we
are moving the Pod 1 foot in each CYCLE and our track is 30 feet long,
we’ll want to keep the cycles to less than 30 so we don’t run out of track.
The only two variables left is ON time and POWER. These two
variables are the only unknowns in this sample. We’ll need to do some
experimentation here to find the proper combination of ON time and
POWER that translates into a 1 foot move on the Pod. In this example,
we can leave the POWER at the default of 40 and simply adjust the ON
time until we get 1 foot in travel. Let’s say that time ends up being 2
seconds for the sake of this example (this number will vary depending
on your specific setup and motor being used).
Now we know each variable to create a move every 10 minutes in 1
foot increments down a 30 foot track. We will set the motor OFF time
to 10 minutes, the motor ON time to 2 seconds, the POWER defaulted
to 40, and the CYCLES set to 30. When we hit run, the Pod will move 1
foot and stop. 10 minutes later, the next cycle will start and the Pod will
move another 1 foot and stop. It will do this 30 times (cycles) before the
move is complete.
28