Rockwell Automation MPL-xxxx Servo Motor User Manual
Page 17
MP-Series Low-inertia Servo Motor with 100 mm to 165 mm Frame Size 17
Rockwell Automation Publication MP-IN001H-EN-P - January 2014
D
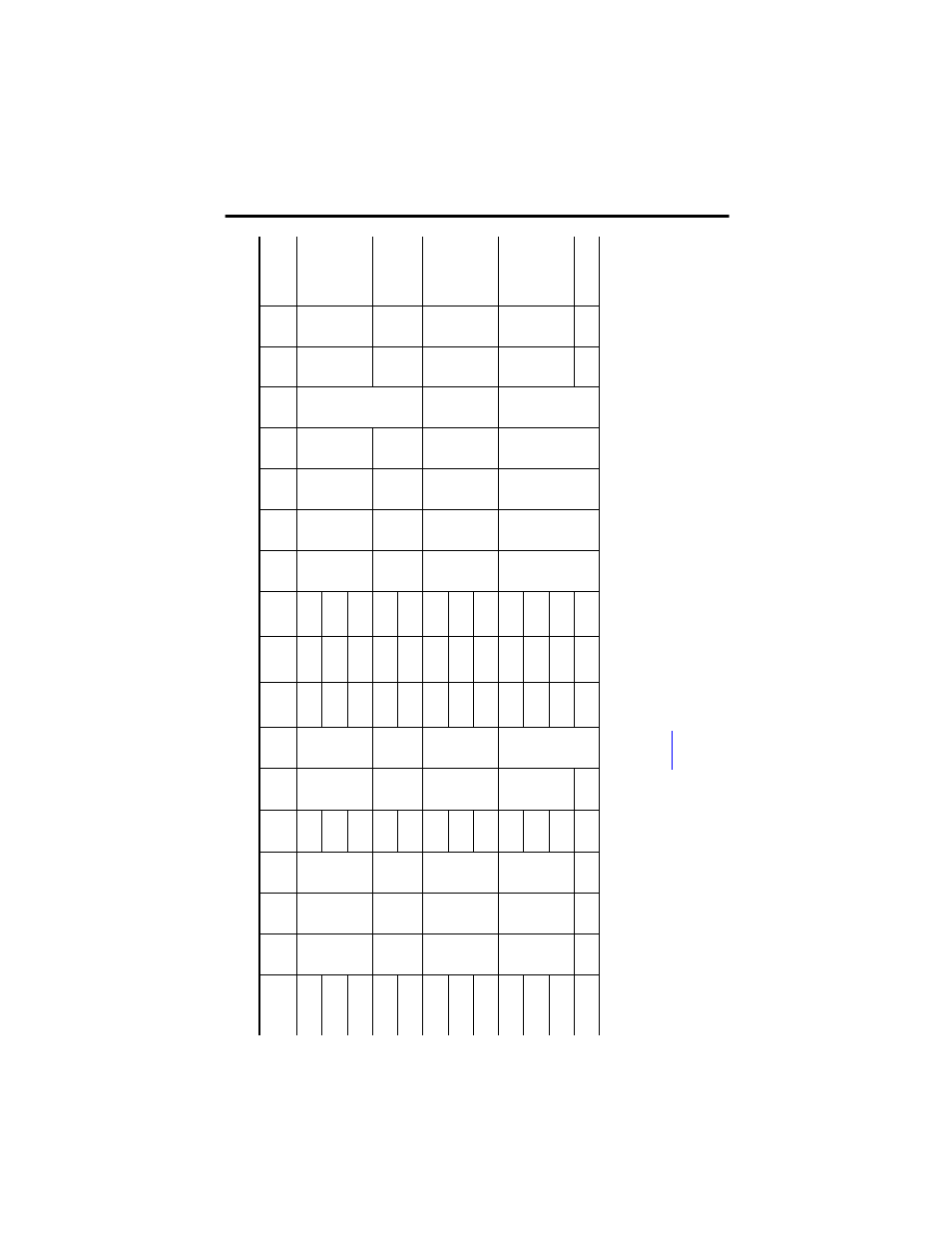
imensions
fo
r Rota
table
Circ
ular
DI
N Conn
ec
tors (c
at
alog nu
mber
MPL
-x
xxx
x-xx
7xxx
)
M
oto
r C
at.
N
o.
AD
mm (in
.)
D *
mm (in
.)
HD
mm (in
.)
L
(1
)
mm (in
.)
L-
LB
(2)
mm (in
.)
LA
mm (in
.)
LB
(1
)
mm (in.)
LD
(1)
mm
(in.)
LE
(1
)
mm (in
.)
M
mm
(i
n.
)
N *
mm
(i
n.
)
P
mm (in.)
S
(3)
mm (in.)
T
mm (in.)
F
(4
)
mm (in.)
GE
(5)
mm (in.)
En
d
o
f S
h
af
t
Th
re
ad
a
nd
D
ep
th
of
H
ole
MP
L-
A/
B31
0
87
.2
(3
.4
4)
16
.0
(0
.6
29)
13
2.0
(5
.2
0)
16
8.0
(6
.6
2)
40
.0
(1
.5
75
)
9.
90
(0
.3
9)
128.0
(5.
04)
62.
0
(2
.45)
102
.0
(4
.0
3)
100.0
(3.
937)
80.0
(3.
15)
89
.4
(3.
52)
7.
0
(0.
283)
2.
74
(0.
108)
5.
0
(0.
20)
3.
0
(0.
12)
M
5
x 0.8-
6H x
12
.5 (
0.49)
MP
L-
A/
B32
0
19
3.0
(7
.6
2)
153.0
(6.
04)
88.
0
(3
.45)
128
.0
(5
.0
3)
MP
L-
A/
B33
0
21
9.0
(8
.6
2)
179.0
(7.
04)
113.
0
(4
.45)
153
.0
(6
.0
3)
MP
L-
A/
B42
0
90
.9
(3
.5
8)
19
.0
(0
.7
49)
14
0.1
(5
.5
2)
19
0.0
(7
.4
8)
40
.0
(1
.5
75
)
10
.16
(0
.4
0)
150.0
(5.
90)
84.
0
(3
.31)
124
.0
(4
.8
9)
115.0
(4.
528)
95.0
(3.
74)
98
.3
(3.
87)
10
.0
(0.
401)
6.
0
(0.
234)
3.
5
(0.
138)
M
6
x 1.0-
6H x
16
(0
.63)
MP
L-
A/
B43
0
21
5.0
(8
.4
8)
175.0
(6.
90)
110.
0
(4
.31)
150
.0
(5
.8
9)
MP
L-
A/
B45
30
98
.6
(3
.8
8)
24
.0
(0
.9
45)
15
5.4
(6
.1
2)
22
9.0
(9
.0
)
50
.0
(1
.9
7)
12
.19
(0
.4
8)
179.0
(7.
03)
113.
0
(4
.44)
153
.0
(6
.0
2)
130.0
(5.
118)
110.0
(4.
331)
113.7
(4.
48)
10
.0
(0.
401)
2.
74
(0.
108)
8.
0
(0.
31)
4.
0
(0.
158)
M
8
x 1.25 -
6H x
19
(0
.75)
MP
L-
A/
B45
40
25
4.0
(10.0
)
204.0
(8.
03)
138.
0
(5
.44)
178
.0
(7
.0
2)
MP
L-
A/
B45
60
30
5
(12.0
)
255.0
(10.
03)
189.
0
(7
.44)
229
.0
(9
.0
2)
MP
L-
A/
B52
0
11
3.4
(4
.4
7)
28
.0
(1
.1
02)
18
5.2
(7
.2
9)
23
7.0
(9
.3
3)
60
.0
(2
.3
8)
14
.0
(0
.5
5)
176.0
(6.
92)
109.
0
(4
.30)
149
.0
(5
.8
8)
165.0
(6.
496)
130.0
(5.
118)
143.5
(5.
65)
12
.0
(0.
481)
3.
12
(0.
123)
8.
0
(0.
31)
4.
0
(0.
158)
M
10 x 1.5-
6H x
22
(0
.87)
MP
L-
A/
B54
0
28
7.0
(11.3
0)
227.0
(8.
92)
162.
0
(6
.30)
200
.0
(7
.8
8)
MP
L-
A/
B56
0
33
7.0
(13.2
7)
277.0
(10.
90)
211.
0
(8
.30)
251
.0
(9
.8
8)
MP
L-
B580
6
13
6.4
(5
.3
7)
32
.0
(1
.2
59)
20
8.1
(8
.1
9)
40
8.0
(16.0
6)
80
.0
(3
.1
5)
328.0
(12.
91)
232.
0
(9
.13)
304
.0
(11.9
5)
10
.0
(0.
39)
5.
0
(0.
197)
M
12 x 1.75
-6H x
28
(1
.10)
(1
)
M
otor
s w
ith
bra
ke,
ad
d
th
is
v
alue
to
th
e d
im
en
si
on
:
MPL
-x
310 thr
ough -
x330:
ad
d 35.
0 m
m
(1.
37 in.
) t
o
L,
LB
, and
L
D.
MPL
-x
420 thr
ough -
x4560
: ad
d 48.
0 m
m
(1
.89 i
n.
) t
o
L,
LB
, an
d LD
.
MPL
-x
520 thr
ough -
x560 add
51.0 mm
(2.0
3 in.)
to
L and LB
, and
LD
.
MPL
-B5
80 ad
d 45.
6 m
m
(1
.79 i
n.
) t
o
L an
d LB
, and 52.
0
mm (2.
05 in.
) t
o LD an
d LE
.
(2)
To
ler
an
ce
fo
r t
his
di
mensio
n i
s ±0.7
(±
0.
028)
.
(3)
x3
xx
an
d
x4
xx
to
lerance is
+0.
36 (±0.00
07),
x
5xx
is
+0.4
3 (
±
0.008
).
(4)
To
ler
an
ce
fo
r t
his
di
mensio
n i
s -
0.03
(-
0.
001)
.
(5)
To
ler
an
ce
fo
r t
his
di
mensio
n i
s +0.1
(+
0.
004)
.
(6)
M
PL
-B
58
0x
is
a
vai
lab
le onl
y
w
ith
46
0V
wi
nd
ing
s.
*
Re
fe
r t
o
Ki
ne
tix
R
ota
ry
Moti
on
Spe
cif
ic
at
io
ns
T
ec
hni
ca
l Da
ta
, p
ubl
ic
at
io
n
, for
to
lerances o
n these m
easur
ements
.