Disable the safe torque-off feature – Rockwell Automation Logix5000 Control Systems: Connect Kinetix 5500 Drives on EtherNet/IP Network Quick Start User Manual
Page 21
Rockwell Automation Publication IASIMP-QS035A-EN-P - December 2012
21
Prepare the Kinetix 5500 Drive Hardware Chapter 1
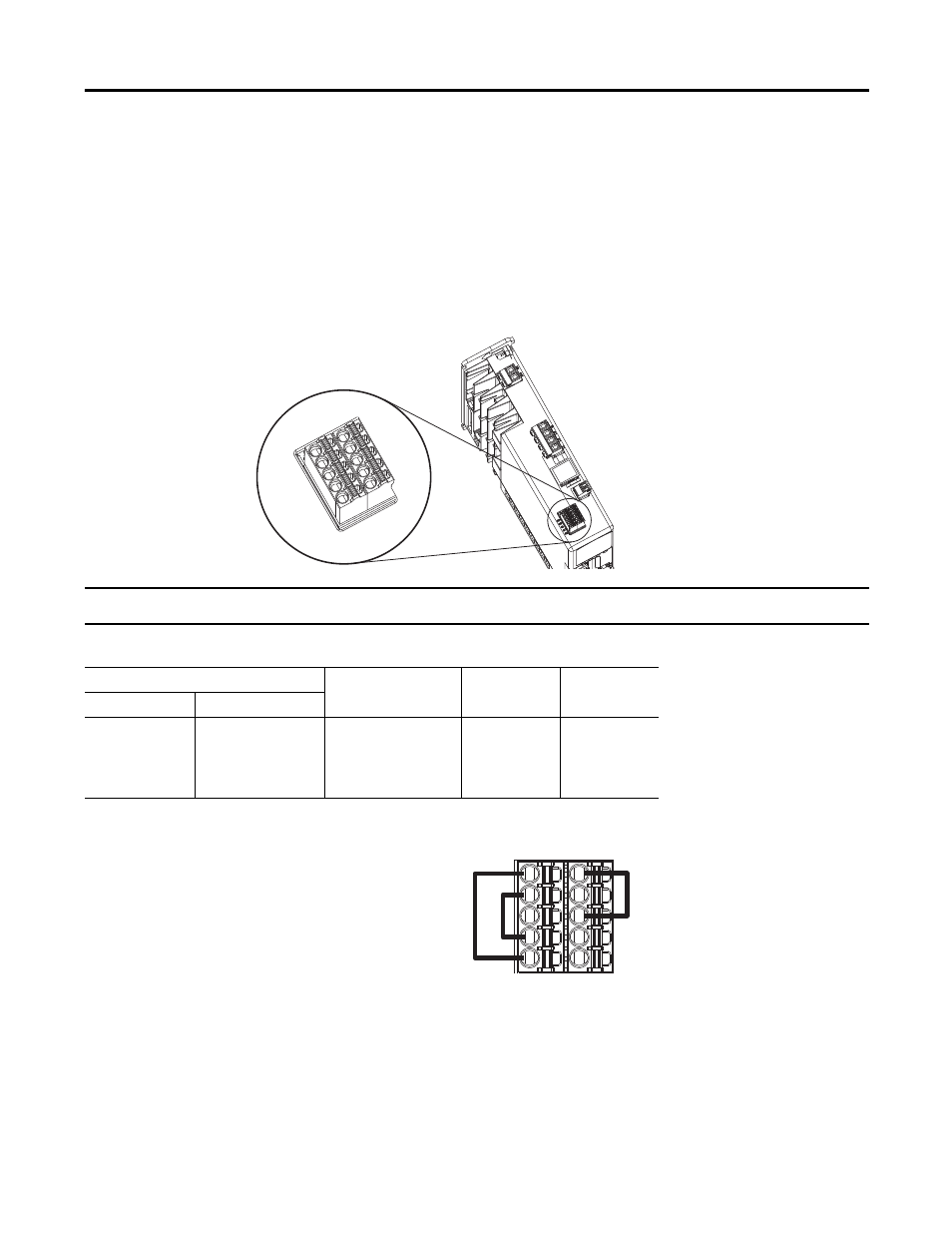
Disable the Safe Torque-off Feature
The safe torque-off circuit is designed to safely turn off all of the output-power transistors. Each Kinetix 5500
drive ships with two 5-pin wiring plugs for wiring to safety devices. If your application, for example, the one used
in this quick start, does not include safety devices, you must disable the safe torque-off feature.
The safe torque-off (STO) connector uses spring tension to secure the wire. Depress the tab, along side each pin,
to insert or release the wire. Two rows of pins are provided for drive-to-drive connections.
Safe Torque-off (STO) Terminal Plug Wiring
To bypass the safety function, these signals
should be wired as shown. With the jumper
wires installed, the safe-off feature is not used.
IMPORTANT
Stranded wires must terminate with ferrules to prevent short circuits, per table D7 of EN 13849.
Safe Torque-off (STO) Connector
Recommended Wire Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
Pin Signal
STO-1
STO-2
STO-3
STO-4
STO-5
SB+
SB-
S1
SC
S2
16…24
10 (0.25)
N/A
1
2
3
4
5
SB+
SB-
S1
SC
S2
Remo
ve
For DC
Bus Only
Kinetix 5500 Drive
Top View
Safe Torque-off (STO)
Connector Plug
Pin 1
SB+
SB-
S1
SC
S2
Safe Torque-off
(STO) Connectors