Input and output faults, Fault codes and descriptions – Rockwell Automation 2094-EN02D-M01-S0 Kinetix 6200 and Kinetix 6500 Safe Torque-off Safety Reference Manual User Manual
Page 34
34
Rockwell Automation Publication 2094-RM002B-EN-P - May 2012
Chapter 5
Troubleshooting the Safe Torque-off Drive
Input and Output Faults
An input or output fault indication can be caused by several wiring fault
conditions during commissioning or normal operation. If an input fault occurs,
check for the following:
• One of the channels may have shorted to a 24V DC source.
• One of the channels may have shorted to a GND source.
• Two input channels have shorted together.
• One or both output channels have an overcurrent condition.
An input fault will also occur if only one of the channels in a dual-channel system
has changed state after a 1-second discrepancy time interval.
Fault Codes and Descriptions
The drive web page can display a fault history queue, which provides a record of
the faults detected by the drive. The fault history queue stores the fault codes and
timestamps for the last 10 faults that occurred.
Refer to the Kinetix 6200 and Kinetix 6500 Modular Multi-axis Servo Drive
User Manual, publicat
, for more information on accessing the
drive web page.
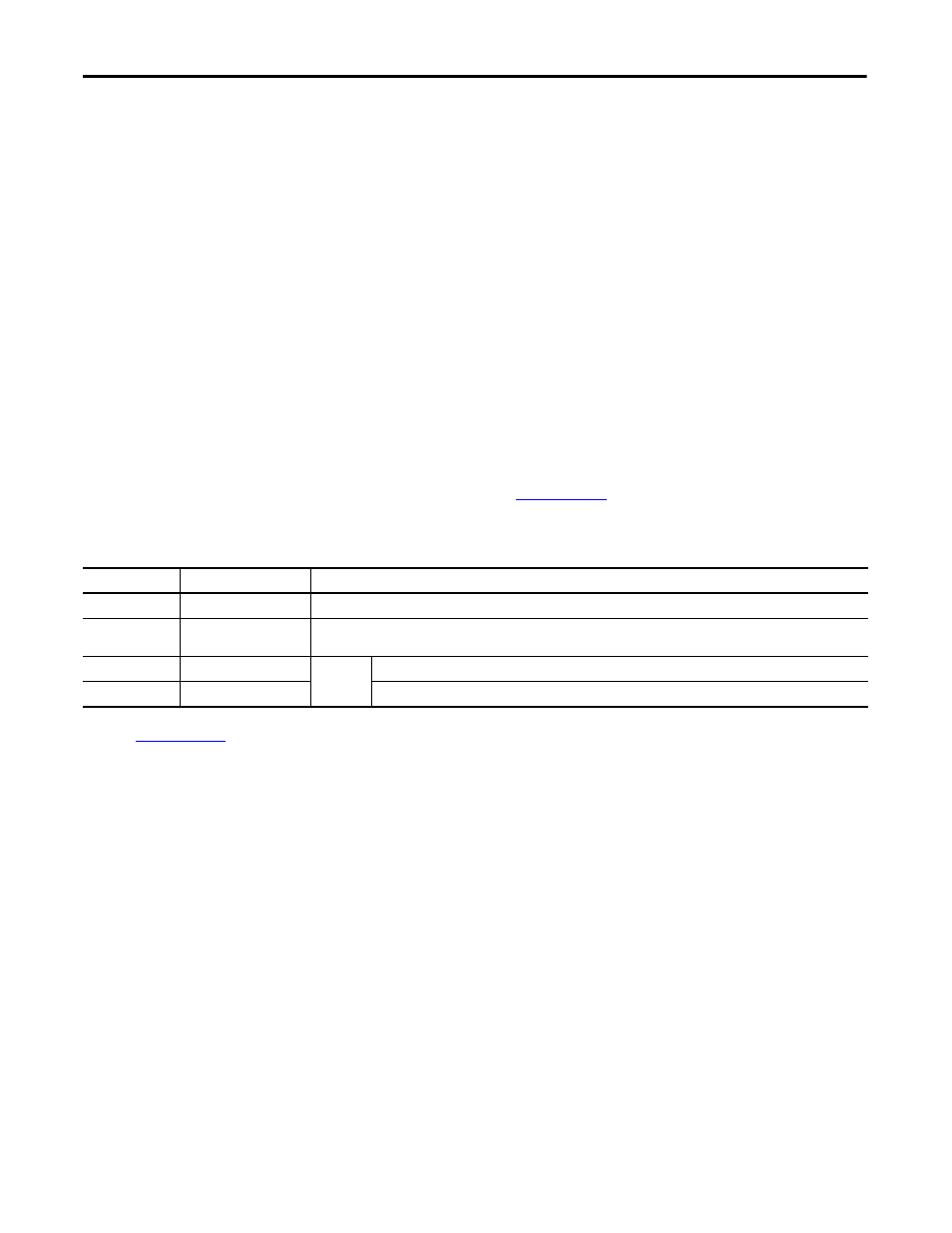
Table 6 - Safe Torque-off Fault Codes
Code
Display Text
Description
SAFE FLT 01...
INTERNAL HDWR nn
(1)
A nonrecoverable microprocessor error has occurred.
SAFE FLT 03...
MP OUT nn
(1)
An MP Output fault occurs if an internal error is detected in the circuit that removes motion producing power from the drive
terminals.
SAFE FLT 09...
SS IN nn
(1)
I/O
Faults
(2)
An SS_In fault occurs if an error is detected in one of the SS_In dual-channel inputs.
SAFE FLT 10...
SS OUT nn
(1)
An SS_Out fault occurs if an error is detected in the SS_Out dual-channel output.
(1) The nn field is a sub code that provides additional information regarding the fault.
(2) Refer to
on this page for more information.