Rockwell Automation 2094-EN02D-M01-S0 Kinetix 6200 and Kinetix 6500 Safe Torque-off Safety Reference Manual User Manual
Page 15
Rockwell Automation Publication 2094-RM002B-EN-P - May 2012
15
Installation and Wiring
Chapter 2
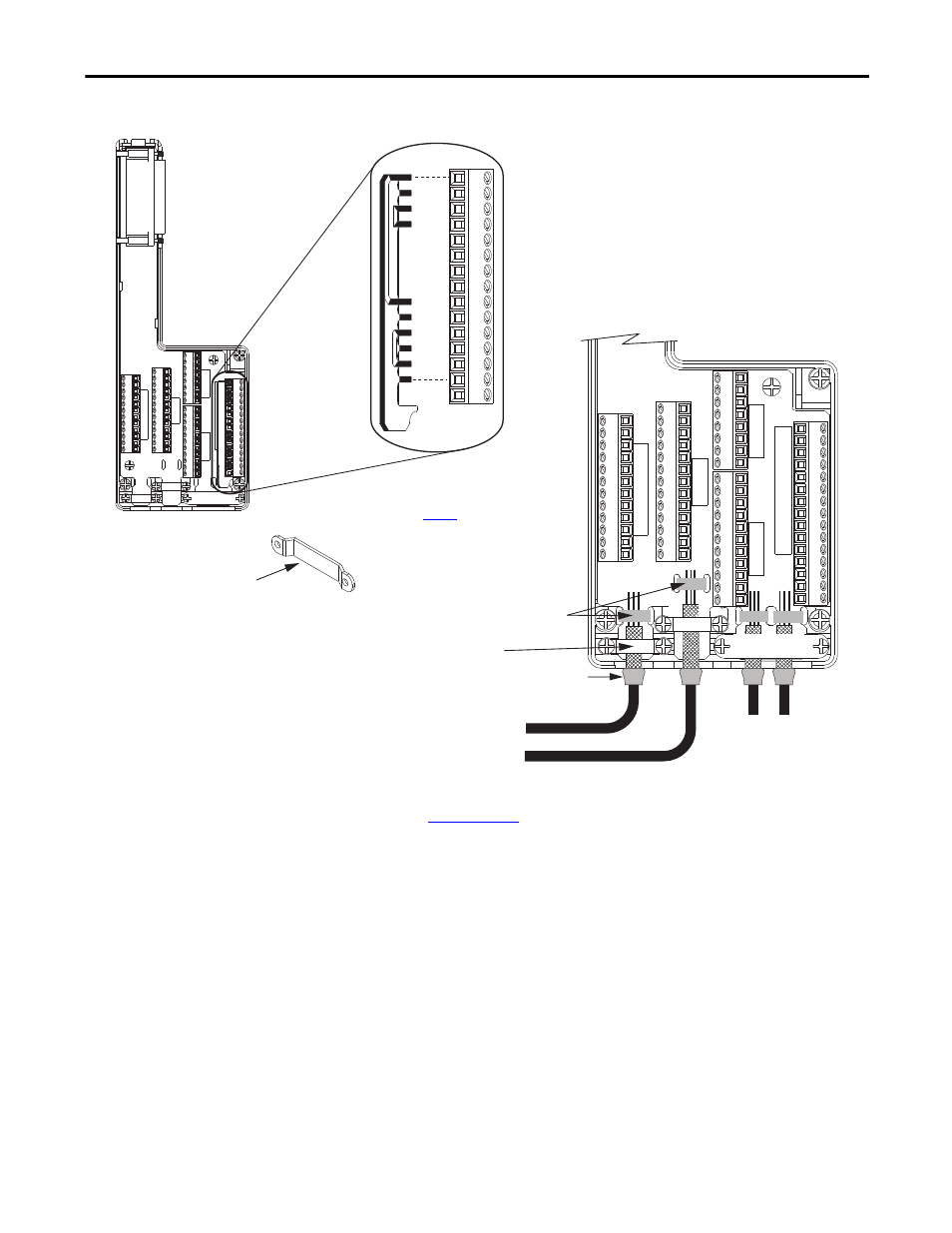
Figure 1 - Making 2090-K6CK-D44M Safety Connections
Refer to the Kinetix 6200 and Kinetix 6500 Modular Servo Drive User Manual,
publicatio
, for other wiring examples using low-profile connector
kits.
28 27 26 25 24 23 22 21 20 19 18 17 15 14 0
AUX FEEDBACK
0 11 10 9 8 7 6 5 4 3 2 1
0 39 41 40 39 42 40 39 43 40 39 44 40
INPUTS
0 38 37 36 35 34 33 32 31 30 29
28 27 28 27 28 27 28 27
S1 ONL
Y
S1 ONL
Y
S0&S1 W/S0 DISABLED
28 27 26 25 24 23 22 21 20 19 18 17 15 14 0
AUX FEEDBACK
0 11 10 9 8 7 6 5 4 3 2 1
0 39 41 40 39 42 40 39 43 40 39 44 40
INPUTS
0 38 37 36 35 34 33 32 31 30 29
28 27 28 27 28 27 28 27
S1 ONL
Y
S1 ONL
Y
S0&S1 W/S0 DISABLED
28 27 26 25 24 23 22 21 20 19 18 17 15 14 0
2090-K6CK-D44M
Low-profile Connector Kit
Use tie wraps (4x)
for stress relief.
Turn clamps over for smaller
diameter cables.
Aux Feedback and I/O
Wires and Cables
Motion-allowed Jumper Installation
(applies to 2094-
xx02x-M0x-S0
control modules)
Safety Wires
and Cables
Use shield clamps (3x) for
high-frequency bonding.
Kit pin numbering corresponds to the IOD
connector. Pins 27, 28, 39, and 40 are given
multiple terminals to accommodate
additional connections.
Refer to
for safety, auxiliary
feedback, and I/O signal descriptions.
Shrink-wrapped
Insulation
Clamp