Discrepancy time – Rockwell Automation 2094-EN02D-M01-S0 Kinetix 6200 and Kinetix 6500 Safe Torque-off Safety Reference Manual User Manual
Page 20
20
Rockwell Automation Publication 2094-RM002B-EN-P - May 2012
Chapter 3
Safe Torque-off I/O Signals
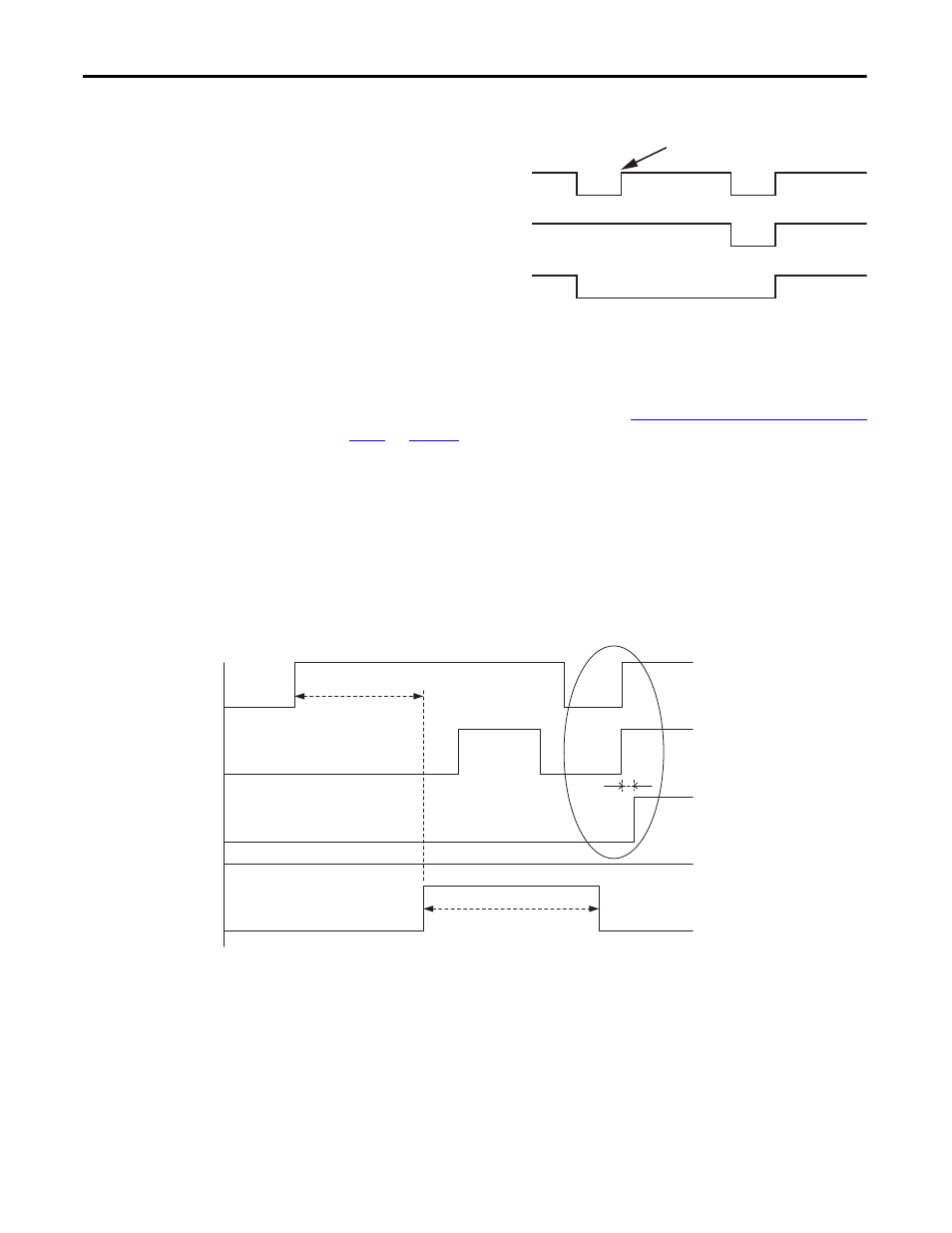
Figure 5 - Cycle Inputs Required
An Input fault occurs if the inputs are discrepant for longer than one second.
For SS_IN_CH0/1, use TEST_OUT_0/1 as a reference signal, or a fault occurs.
For more information on I/O faults, refer to
Troubleshooting the Safe Torque-off
Discrepancy Time
The maximum discrepancy time between two inputs is 1.0 second. If both inputs
do not change within 1.0 second, an input fault is displayed, the safety circuit is
activated, and torque is removed from the motor.
Figure 6 - Discrepancy Time
Behavior of reset and safe-off inputs while transitioning from Safe_Off state to
Safe_Monitor state.
Channel 0
Active
Inactive
Channel 1
Active
Inactive
Evaluated Status
ON
OFF
Cycle Inputs Required
SS_IN_CH0 or
SS_IN_CH2
SS_IN_CH1 or
SS_IN_CH3
Gate Power
and Gate Enable
RESET_IN
Fault
t on
T
on
(max) = 20 ms
plus Debounce Filter Delay
(if applicable).
Safe-off inputs return to
inactive state before Gate
Power can be restored.
Input Discrepancy
Time (1.0 s)
Latch Input Error
Time (1.0 s)