Diagnostics – Lenze S94P01G Position Servo User Manual
Page 77
S94P01G
75
Diagnostics
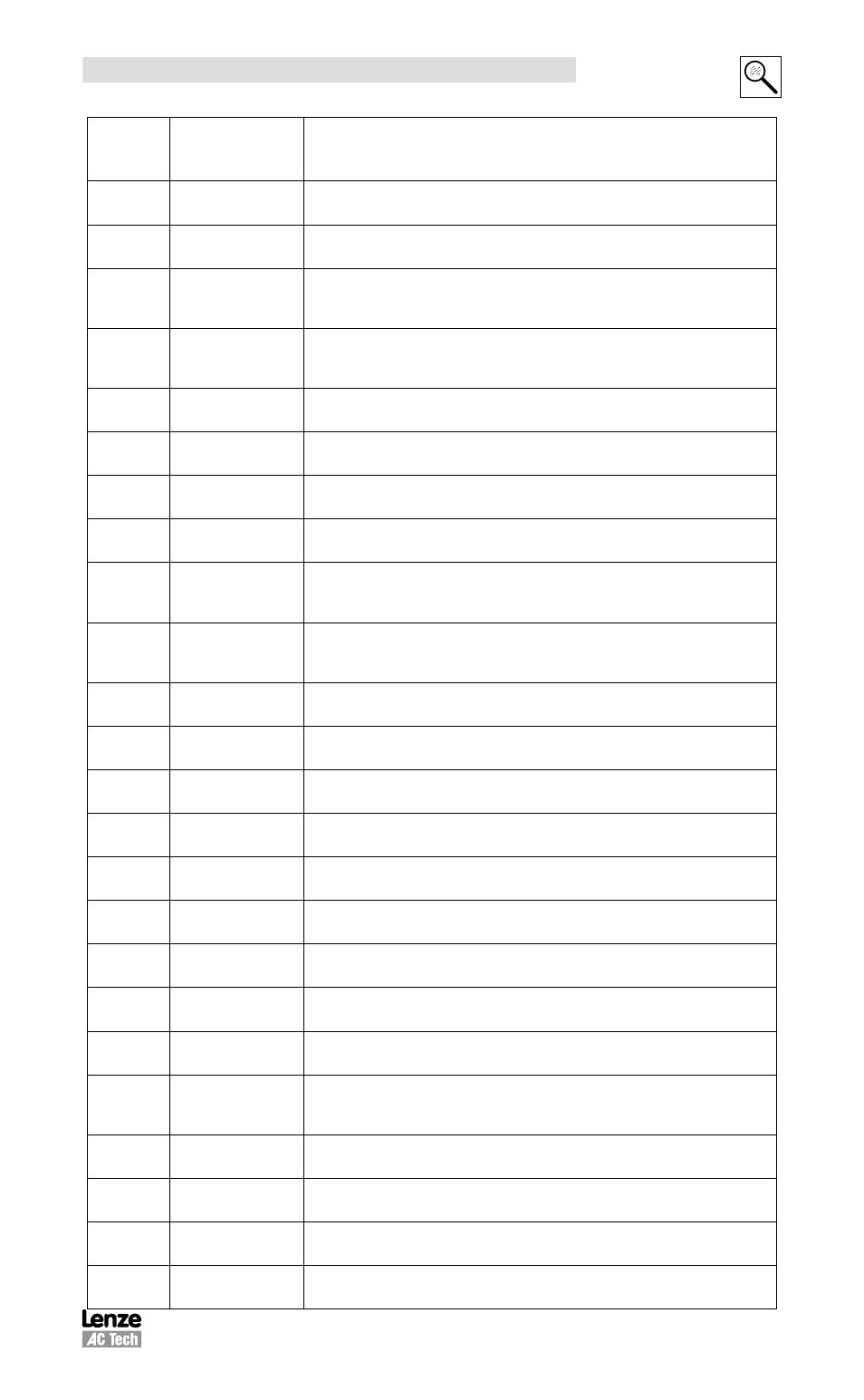
Fault
Code
(Display)
Fault
Description
F_15
Hardware overload
protection
Occurs when the phase current becomes higher than 400% of total drive’s
current capability for more then 5ms.
F_18
Arithmetic Error
Division by zero
Statement executed within the Indexer Program results in a division by 0
being performed. Drive programming error (error in drive source code).
F_19
Arithmetic Error
Register overflow
Statement executed within the Indexer Program results in a value being
generated that is too big to be stored in the requested register. Drive
programming error (error in drive source code).
F_20
Subroutine stack
overflow
Exceeded 32 levels subroutines stack depth. Caused by executing
excessive subroutine calls without a RETURN statement. Drive
programming error (error in drive source code).
F_21
Subroutine stack
underflow
Executing RETURN statement without preceding call to subroutine. Drive
programming error (error in drive source code).
F_22
Arithmetic stack
overflow
Variable evaluation stack overflow. Expression too complicated for
compiler to process. Drive programming error (error in drive source code).
F_23
Motion Queue
overflow
32 levels depth exceeded. Drive programming error (error in drive source
code).
F_24
Motion Queue
underflow
Relates to the MDV statements in the Indexer Program. Drive programming
error (error in drive source code).
F_25
Unknown
opcode
Byte code interpreter error; May occur when program is missing the closing
END statement; when subroutine has no RETURN statement; or if data in
EPM is corrupted at run-time
F_26
Unknown
byte code
Byte code interpreter error; May occur when program is missing the closing
END statement; when subroutine has no RETURN statement; or if data in
EPM is corrupted at run-time
F_27
Drive disabled
Attempt to execute motion while drive is disabled. Drive programming error
(error in drive source code).
F_28
Accel too high
Motion statement parameters calculate an Accel value above the system
capability. Drive programming error (error in drive source code).
F_29
Accel too low
Motion statement parameters calculate an Accel value below the system
capability. Drive programming error (error in drive source code).
F_30
Velocity too high
Motion statement parameters calculate a velocity above the system
capability. Drive programming error (error in drive source code).
F_31
Velocity too low
Motion statement parameters calculate a velocity below the system
capability. Drive programming error (error in drive source code).
F_32
Positive Limit
Switch
Positive limit switch is activated.
(Only available while drive is in position mode)
F_33
Negative Limit
Switch
Negative limit switch is activated.
(Only available while drive is in position mode)
F_34
Positive motion w/
Pos Lim Sw ON
Attempt at positive motion with engaged positive limit switch
F_35
Negative motion w/
Neg Lim Sw ON
Attempt at negative motion with engaged negative limit switch
F_36
Drive Disabled by
User at Enable
Input
The drive is disabled while operating or an attempt is made to enable the
drive without deactivating “Inhibit input”. “Inhibit” input has reverse polarity
F_39
Positive soft limit
reached
Programmed (Soft) absolute limits reached during motion
F_40
Negative soft limit
reached
Programmed (Soft) absolute limits reached during motion
F_41
Unknown Variable
ID
Attempt to use variable with unknown ID from user program. Drive
programming error (error in drive source code).
F_45
2nd Encoder
Position Error
Secondary encoder position error has exceeded maximum value