Interface, 2 motor over-temperature protection, 3 motor setup – Lenze S94P01G Position Servo User Manual
Page 34
S94P01G
32
Interface
4.5.2 Motor Over-temperature Protection
If using a motor equipped with an encoder and PTC thermal sensor, the encoder
feedback cable will have flying leads exiting the P4 connector to be wired to the P7.1
(T1) and P7.2 (T2) terminals. If using a motor equipped with a Resolver and a PTC
sensor, the thermal feedback is pased directly to the drive via the resolver 9-pin D shell
connector.
Use parameter “Motor PTC cut-off resistance” (refer to section 5.3.12) to set the
resistance that corresponds to maximum motor allowed temperature. The parameter
“Motor temperature sensor” must also be set to ENABLE. If the motor doesn’t have a
PTC sensor, set this parameter to DISABLE. This input will also work with N.C. thermal
switches which have only two states; Open or Closed. In this case “Motor PTC cut-off
resistance” parameter can be set to the default value.
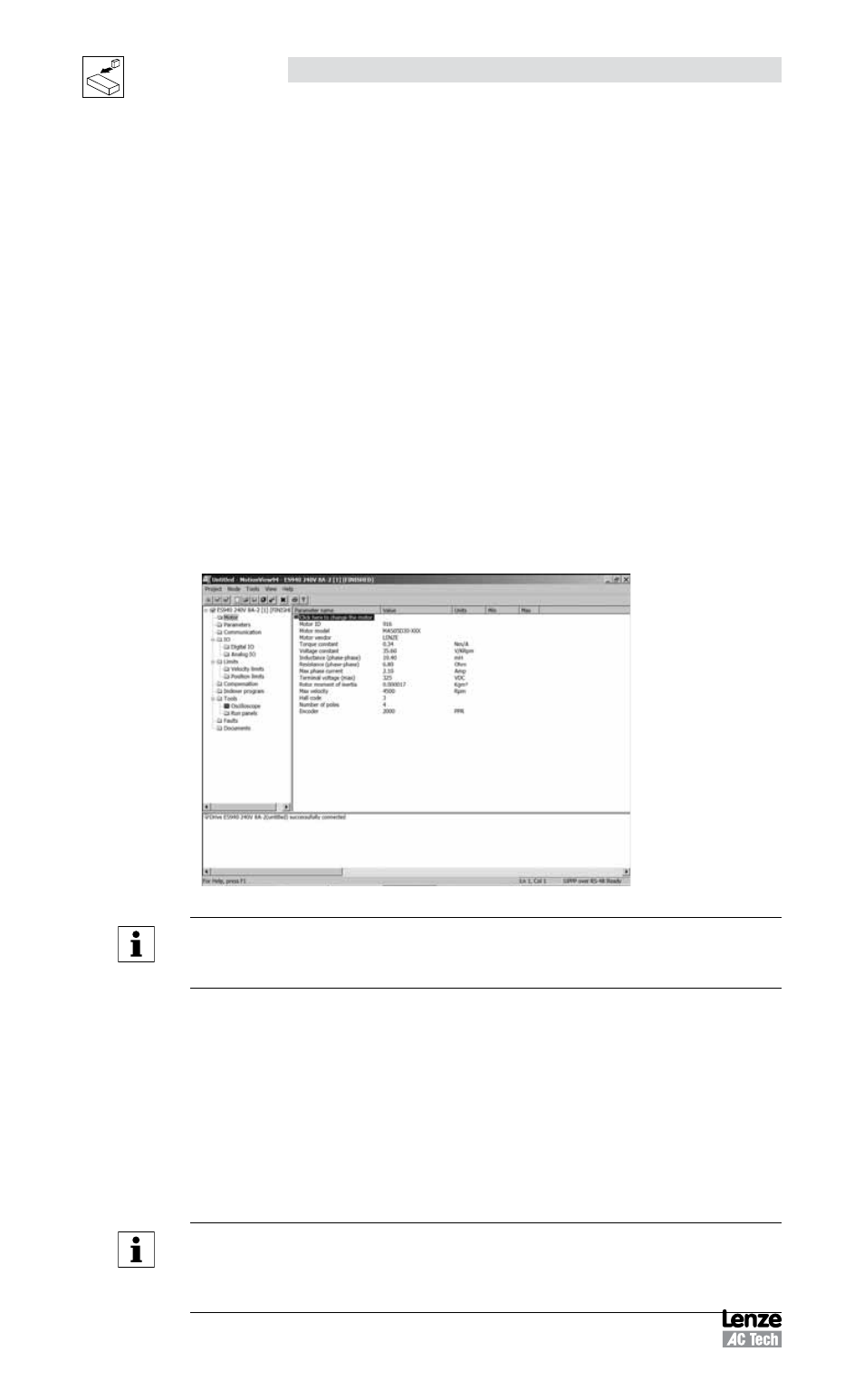
4.5.3 Motor Setup
Once you are connected to the PostionServo via MotionView a “Parameter Tree” will
appear in the “Parameter Tree Window”. The various parameters of the drive are shown
here as folders and files. If the “Motor” folder is selected, all motor parameters can
be viewed in the “Parameter View Window”. To view selected motor parameters or to
select a new motor click the section marked “CLICK HERE TO CHANGE”.
S911
MotionView’s “Motor Group” folder and its contents
NOTE
If the drive is ENABLED, a new motor cannot be set. You can only set a new motor
when the drive is DISABLED.
To View selected motor parameters or to make a new motor selection:
• Click “Click here to change the motor” from the Parameter View Window (see
figure above). If just viewing the motor parameters click Cancel on the Motor
Parameters dialog box when done to dismiss the box.
• Select motor Vendor from the right list box and desired motor from the left list box.
• If you will be using a “custom” motor (not listed in our motor database) go to ”Using
a custom motor” topic in the next section.
• Finally, click the OK button to dismiss the dialog box and return to MotionView’s main
program.
NOTE
To help prevent the motor from drawing to much current and possibility overheating
it is recommended that the drives “Current Limit” be checked against the motors
“Nominal Phase Current” and set accordingly.