Velocity & acceleration (cont.) – RMS Technologies R325P DRIVER User Manual
Page 17
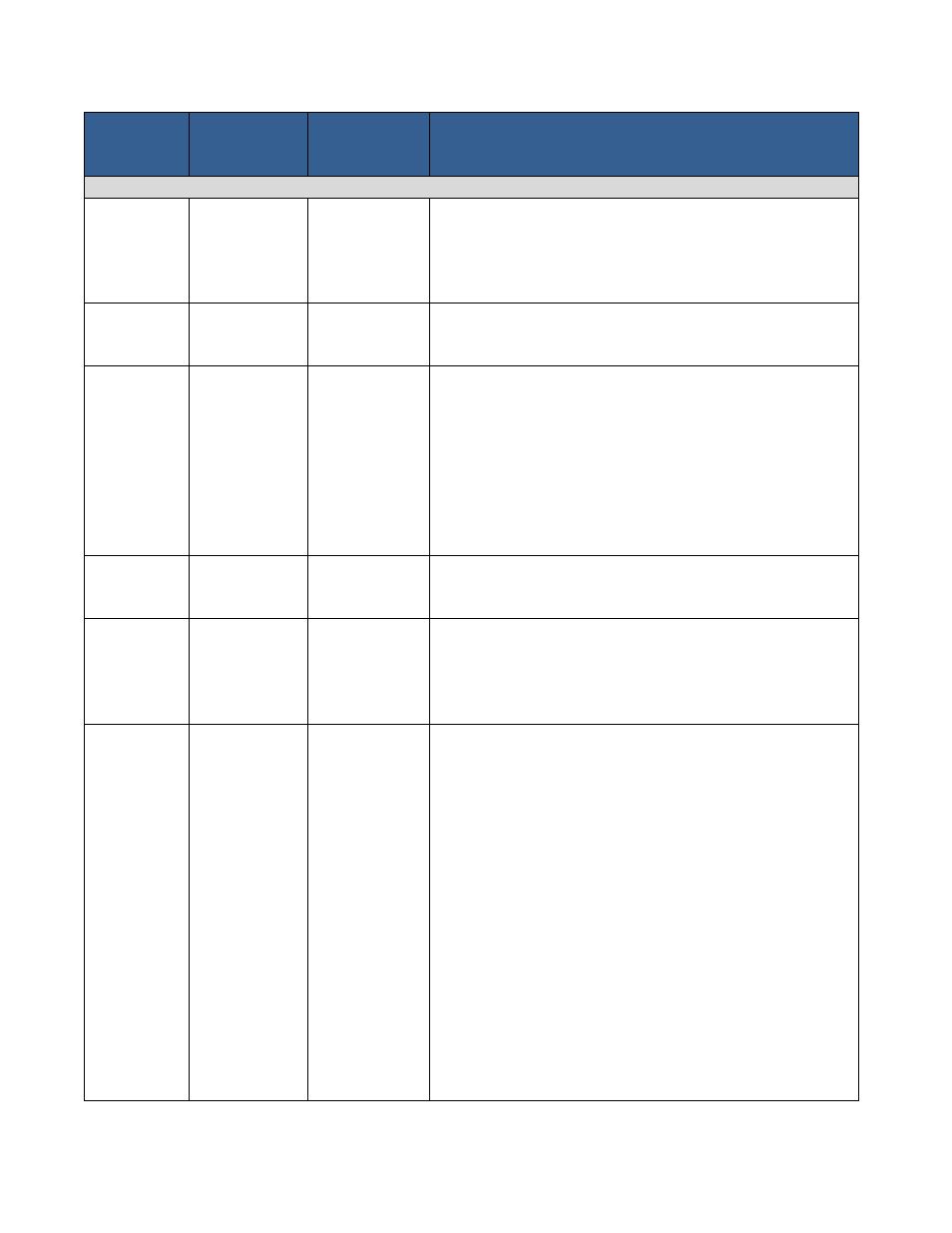
Command
(Case
Sensitive)
Operand
Example
Description
VELOCITY & ACCELERATION (cont.)
AP +/–
2,147,483,646
#AAP1000
Moves to the
1000
th
position.
Absolute Position - Command Only
- Used to make an absolute position move (in step
resolution units).
CV +/- 50,000
#ACV
Current Velocity - Query Only
- Used when a Position Move (PM) or Velocity Move (VM)
is in progress. Otherwise returns zero.
DV
+/- 50,000
#ADV1000
#ADV-1000
Rotates CW at
1000 pps then
CCW at 1000
pps. Use this
to rotate CW
& CCW.
Direction Velocity – Command Only
-This command is the exact same as Velocity Move (VM)
with the addition of being able to ramp up and down when
making moves from Positive to Negative. In the given
example, it will rotate at 1000 pps.
When issued #ADV-1000, it will ramp down to 0 then back
up to 1000 pps but rotating in the opposite direction.
Note: No value is returned.
MS 0 -2
#AMS
Move Status - Query Only
- Reads Motion Status. Returns 0 for No Motion, 1 for
Position Move, and 2 for Velocity Move.
MV 250 - 15,000
#AMV500
Sets minimum
velocity to 500
SPS
Minimum Velocity - Command or Query
Default = 250
- Reads or sets the minimum velocity for both Position and
Velocity command moves. The units are steps (at the
current Step Resolution) per second.
PM +/-
2,000,000,000
#APM1000
Makes a 1000
step move
from the
current
position
Position Move - Command Only
- Causes a ‘Relative Motion’ Position Move, using an
approximately trapezoidal profile. The initial velocity is
defined by ‘Start Velocity’ (SV), the profile ramp is defined
by ‘Acceleration’ (AC), and the ‘Constant Velocity’ step rate
by ‘Velocity Limit’ (VL). ‘Minimum Velocity’ (MV) is used to
ensure that the deceleration ramp does not set velocity to
zero before the target position is reached.
- It should be remembered that, while the ‘Position Move’
value defines the number of steps to be made from the
current position, the value returned by ‘Current Position’
(CP) both before and after a ‘Position Move’ are on an
‘Absolute’ step count scale.
- CP readings can be used to determine PM values required
to reach any given position on the ‘Absolute’ step count
scale.
Note: This command does not return a value.
RMS Technologies
Page 17
Version 1.01
R325PE Single Axis Closed loop Driver/Indexer Manual
5/29/2013