Homing & positioning, Velocity & acceleration – RMS Technologies R325P DRIVER User Manual
Page 16
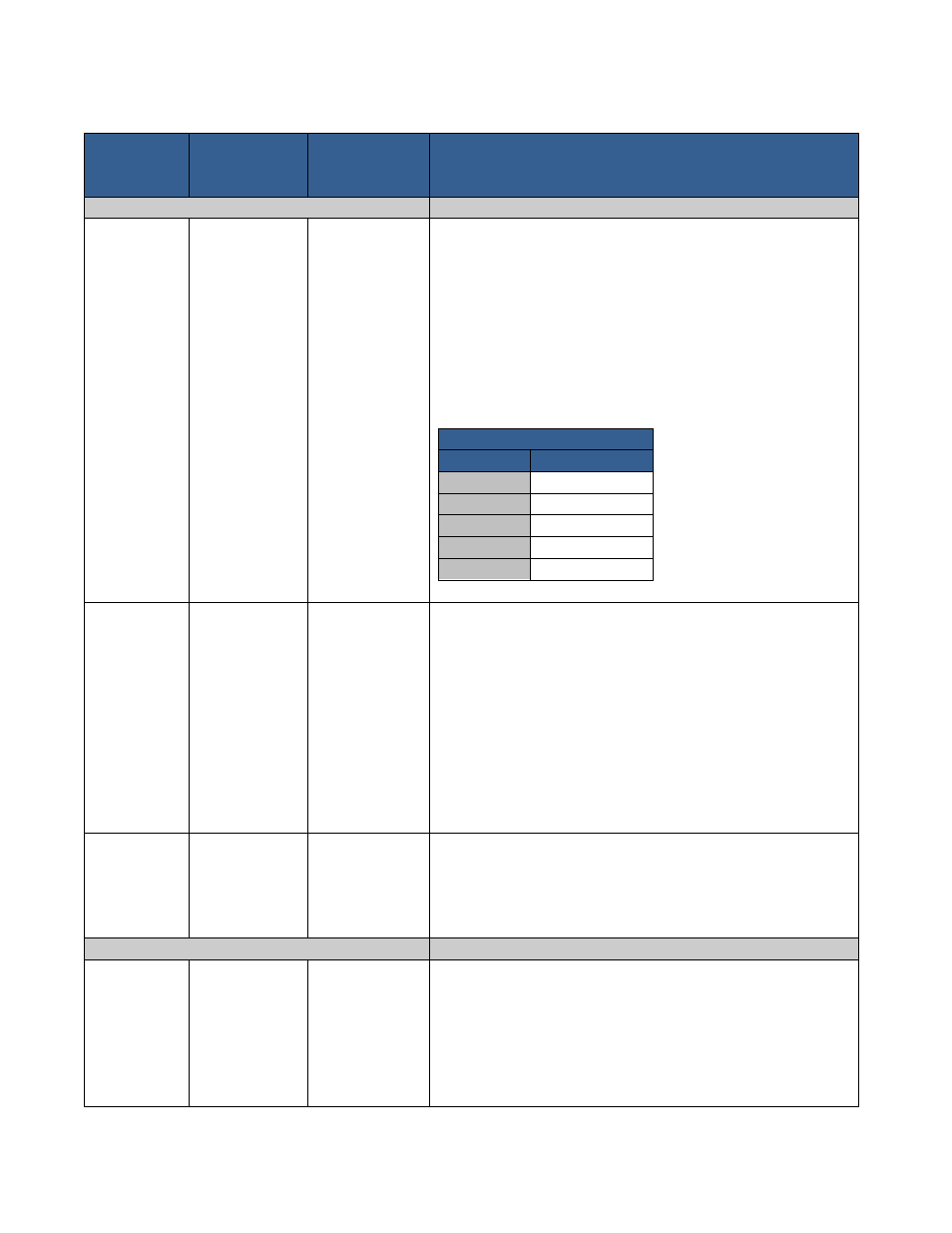
Table 8.1 – List of Commands
Command
(Case
Sensitive)
Operand
Example
Description
HOMING & POSITIONING
HA 0 = Forward
1 = Reverse
#AHA1
Motor turns in
the reverse
direction
Home Axis - Command Only
- Causes the motor to move at the preset Start Velocity
(SV) in the direction set by the command value. Motion
stops when the index input of a device on the input pin
goes TRUE then stops and sets Absolute Position and
Current Encoder to zero. Motion can also stop by the entry
of a Stop Motion (SM) command.
- Forward is defined as the direction the motor turns when
the ‘Direction’ input (P1-3) is set TRUE, or there is no
connection to this input.
P2 Configuration
Pin No
Function
1
GND
2
Index
3
-
4
+5 V
5
-
Table 8.2
CP +/–
2,147,483,646
#ACP1000
Sets the
current
position to be
1000
#ACP
Returns the
current
position of the
motor
Current Position - Command or Query.
- Returns the absolute position of the axis if no value is
passed. Valid after power cycles if a Save Data Command is
issued before power down. Can be used to set current
position value.
The units are steps at the current step resolution (value
becomes invalid with step resolution changes). The
absolute position scale is set to zero by the Zero Position
command (ZP) or the execution of a Home Axis (HA)
command.
ZP -
#AZP
Zero Position - Command Only
- Sets the Current Position and the Encoder Position to zero
Note: This command functions differently between R325I
and R325IE
VELOCITY & ACCELERATION
AC 1 - 250
#AAC1
Sets
Acceleration
to 1000 PPS^2
Acceleration - Command or Query
Default = 10
Used to shape the acceleration and deceleration ramps of
position moves, and the rate of velocity change for velocity
moves. Does not affect any of the basic step and direction
move operations. Acceleration Factor * 1000 Pulses per
Second
RMS Technologies
Page 16
Version 1.01
R325PE Single Axis Closed loop Driver/Indexer Manual
5/29/2013