5 status words, 6 exception responses – error conditions – NOVUS N1020 User Manual
Page 2
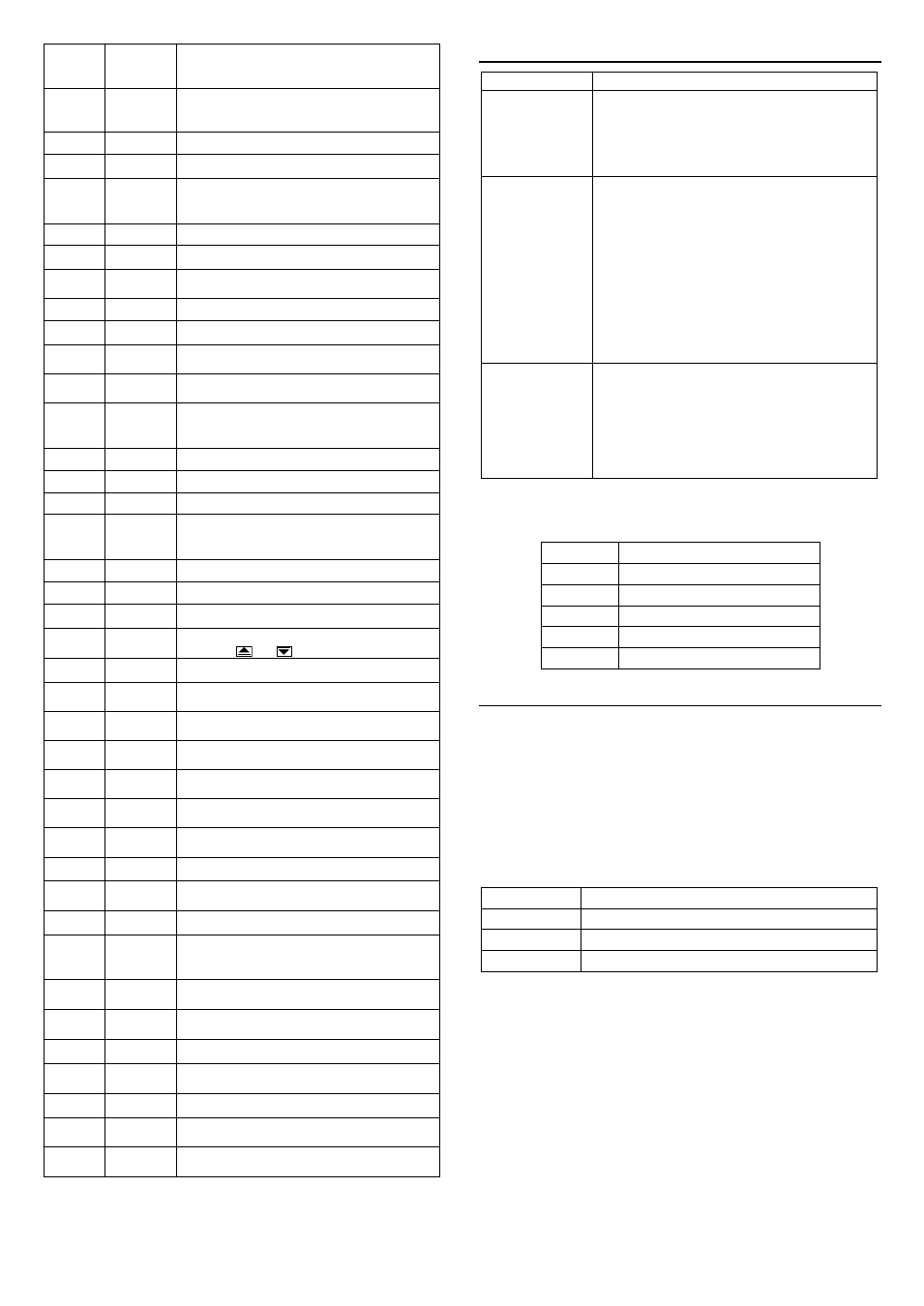
0030
dppo
PV decimal point position
Range: 0 to 3
0→X.XXX; 1→XX.XX; 2→XXX.X; 3→XXXX
0031
Sp.a1
Alarm 1 Setpoint.
Range: Between spll and spkl for non-differential
alarm or at spkl - spll for differential alarm.
0032
Sp.a2
Alarm 2 Setpoint. Range: same as in spa1.
0033~0034 Reserved
0035
Fva1
Alarm 1 Function. Range: 0 to 8
0→off; 1→lo; 2→ki; 3→dif;4→difl;
5→difk; 6→t..0n; 7→t..End; 8→err;
0036
Fva2
Alarm 2 Function. Range: same as in fua1.
0037~0038 Reserved
0039
Kya1
Alarm 1 Hysteresis. Range: 0 to 9999 (0.00 to
99.99%)
0040
Kya2
Alarm 2 Hysteresis. Range: same as in kya1.
0041~0042 Reserved
0043
type
PV input type
Range: 0 to 9. See operation manual.
0044
addr
Communication slave address.
Range: 1 to 247
0045
bavd
Communication Baud-Rate. Range: 0 to 7
0→1200;1→2400;2→4800;3→9600; 4→19200;
5→32400; 6→57600; 7→115200.
0046
avto
Control Mode. Range: 0→manual; 1→automatic.
0047
rvn
Enable control. Range: 0→no; 1→yes.
0048
act
Control action. Range: 0→direct; 1→reverse.
0049
atvn
Auto tune enable. Range: 0 to 5
0→FAST; 1→FULL; 2→SELF; 3→ RSLF;
4→TGHT.
0050
Bla1
Alarm 1 power-up inhibit. Range: 0→no; 1→yes.
0051
Bla2
Alarm 2 power-up inhibit. Range: same as in bla1.
0052~0053 Reserved
0054
Key
Key press remote action. Range: 0 to 9
1→ P; 2→
; 4→
; 8→ F
0055~0061 Reserved
0062
A1t1
Alarm 1 Time 1. Range: 0 to 6500s
Refer to Table 4 for more details.
0063
A1t2
Alarm 1 Time 2 (in seconds)
Range: same as in a1t1.
0064
A2t1
Alarm 2 Time 1 (in seconds)
Range: same as in a1t1.
0065
A2t2
Alarm 2 Time 2 (in seconds)
Range: same as in a1t1.
0066
sfst
Soft-Start time (in seconds)
Range: 0 to 9999
0067
vnit
Temperature unit. Range: 0 to 1
0→°C; 1→°F.
0068
Reserved
0069
TECO
Timer End Controller Off. Range: 0 to 1
0→ Disabled; 1→ Enable.
0070~0080 Reserved
0081
FLSH
Enables the top display blinking as a function of the
selected alarm. Range: 0 to 1
0→ Disabled; 1→ Enable.
0082
0uT1
Output 1 function. Range: 0 to 4
0→off; 1→Ctrl; 2→A1; 3→A2; 4→A1A2.
0083
0uT2
Output 2 function. Range: 0 to 4
0→off; 1→Ctrl; 2→A1; 3→A2; 4→A1A2.
0084~0085 Reserved
0086
Rstr
Restores original default calibration. Range: 0 to 1.
0→do not restore; 1→ restore calibration
0087
Reserved
Internal use
0088
Prot
Password protection level. Range: 1 to 5.
Check instruction manual for further details.
0089
PRTY
Serial communication parity. Range: 0 to 2.
0→no parity; 1→ even; 2→ odd;
1.5 STATUS WORDS
Register
Value Format
Status Word 1
bit 0 - Alarm 1 (0-inactive; 1-active)
bit 1 - Alarm 2 (0-inactive; 1-active)
bit 2 ~ 7 - Reserved
bit 8 - Hardware detection value
bit 9 - Hardware detection value
bit 10 ~15 - Reserved
Status Word 2
bit 0 - Automatic (0- manual; 1- automatic)
bit 1 - Run (0-stop; 1-run)
bit 2 - Control Action 1 (0-direct; 1 reverse)
bit 3 - Reserved
bit 4 - Auto-tune (0-no; 1-yes)
bit 5 - Alarm 1 power-up inhibit 1 (0-no; 1-yes)
bit 6 - Alarm 1 power-up inhibit 2 (0-no; 1-yes)
bit 7 - 8 - Reserved
bit 9 - Unit (0-°C; 1-°F)
bit 10 - Reserved
bit 11 - Output 1 status
bit 12 - Output 2 status
bit 13 - 14 - 15 - Reserved
Status Word 3
bit 0 - Very low PV conversion (0-no; 1-yes)
bit 1 - Negative conversion after calibration (0-no; 1-yes)
bit 2 - Very high PV conversion (0-no; 1-yes)
bit 3 - Exceeded linearization limit (0-no; 1-yes)
bit 4 - Very high Pt100 cable resistance (0-no; 1-yes)
bit 5 - Self zero conversion out of range (0-no; 1-yes)
bit 6 - Self span conversion out of range (0-no; 1-yes)
bit 7 ~ 15 - Reserved
Table 2 - Value of Status Words
Writing to an output bit is only possible if the output has no function assigned to it (the
output is configured to OFF in Alarm Cycle).
Coil Status
Output description
0
Output 1 Status 1 (I/O1)
1
Output 1 Status 2 (I/O2)
2
Output 1 Status 3 (I/O3)
3
Output 1 Status 4 (I/O4)
4
Output 1 Status 5 (I/O5)
1.6 EXCEPTION RESPONSES – ERROR CONDITIONS
The MODBUS RTU protocol checks the CRC in the data blocks received. Reception
errors are detected by the CRC, causing the controller to discard the packet, not
sending any reply to the master. After receiving an error-free packet, the controller
processes the packet and verifies whether the request is valid or not, sending back an
exception error code in case of an invalid request. Response frames containing error
codes have the most significant bit of the Modbus command set.
If a WRITE command sends an out-of-range value to a parameter, the controller will
clamp the value to the parameter range limits, replying with a value that reflects these
limits (maximum or minimum value allowed for the parameter).
The controller ignores broadcast READ commands; the controller processes only
broadcast WRITE commands.
Error Code
Error Description
01
Invalid Command or inexistent
02
Invalid Register Number or out of range
03
Invalid Register Quantity or out of range
Table 3 – Exception response error codes