Discussed above – PNI SENtral MandM User Manual
Page 31
PNI Sensor Corporation
Doc #1020129 revE
SENtral M&M Technical Datasheet
Page 30
Rotation Vector
The rotation vector is the first three elements of the quaternion output, Qx, Qy, and Qz. The
fourth element, Qw, is not included in the rotation vector. The rotation vector in ENU
convention will be the first three elements of Q
ENU
, discussed above.
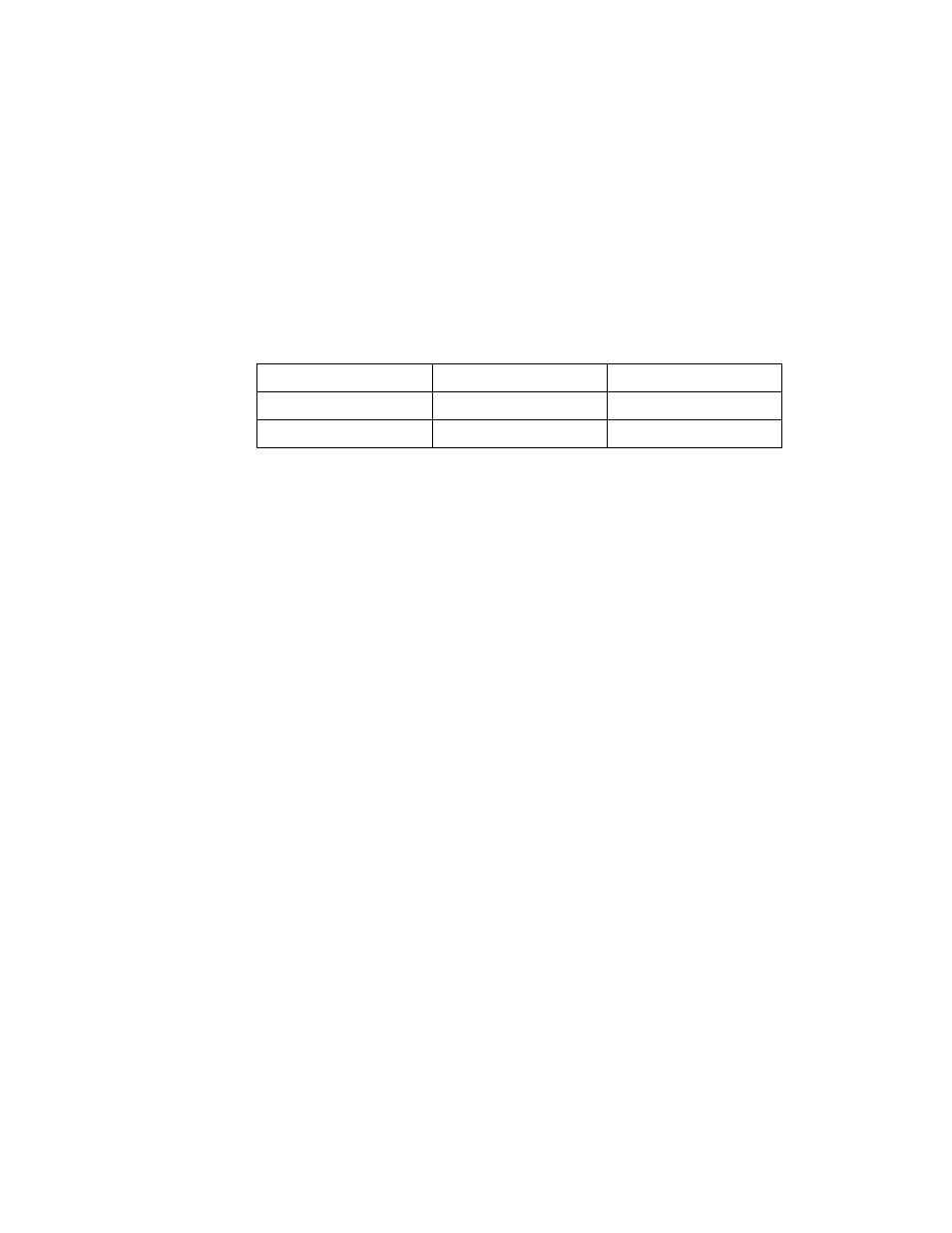
Rotation Matrix, or Direction Cosine Matrix (DCM)
The rotation matrix, also known as the direction cosine matrix (DCM), can be established
from the quaternion output using the following conversion. Q
ENU
values can be substituted
to give the rotation matrix with an ENU convention.
Qw
2
+ Qx
2
– Qy
2
– Qz
2
2*(Qx*Qy + Qw*Qz)
2*(Qx*Qz
– Qw*Qy)
R =
2*(Qx*Qy
– Qw*Qz)
Qw
2
– Qx
2
+ Qy
2
– Qz
2
2*(Qy*Qz + Qw*Qy)
2*(Qx*Qz + Qw*Qy)
2*(Qy*Qz
– Qw*Qy)
Qw
2
– Qx
2
– Qy
2
+ Qz
2